"PhotoRobot Workspace" nustatymas
Šiame vartotojo vadove aprašomi žingsniai, kaip nustatyti darbo sritį PhotoRobot Controls App (toliau – „CAPP“). Darbo sritis yra techninės įrangos sąrašas, kuris bus naudojamas konkrečiai fotosesijai. Ji gali apimti įvairius PhotoRobot modulius, kameras, šviesas ir kitus priedus.
Pastaba: Jei dar neįdiegėte ir nesusipažinote su CAPP, žr. PhotoRobot Pradžia, kad gautumėte programinės įrangos, jos konfigūracijos ir naudojimo apžvalgą. Šiame vartotojo vadove pateikta informacija skirta padėti klientams, kurie jau turi bendrą supratimą apie programinę įrangą.
Be to, demonstraciniais tikslais atkreipkite dėmesį, kad galima dirbti su iš anksto nustatyta pavyzdine darbo sritimi, kuri sukonfigūruota naudoti virtualią aparatinę įrangą. Pavyzdinė darbo sritis leidžia vartotojams eksperimentuoti su įvairiomis CAPP funkcijomis, pasirenkant virtualius robotus ir kameras.
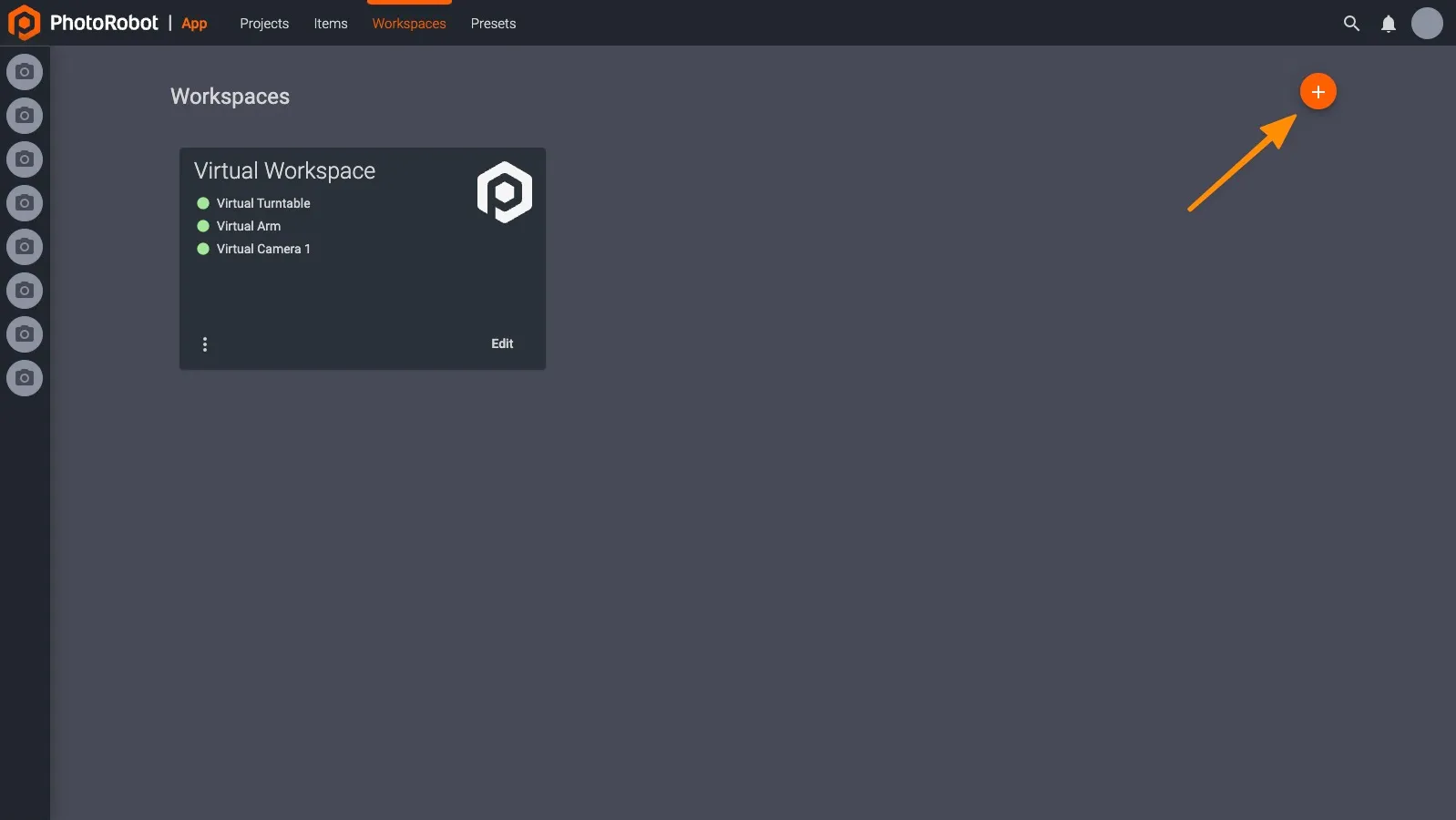
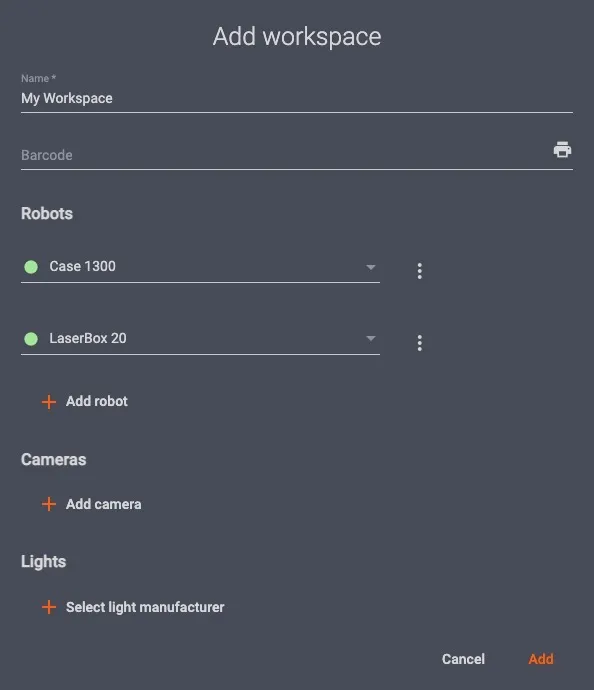
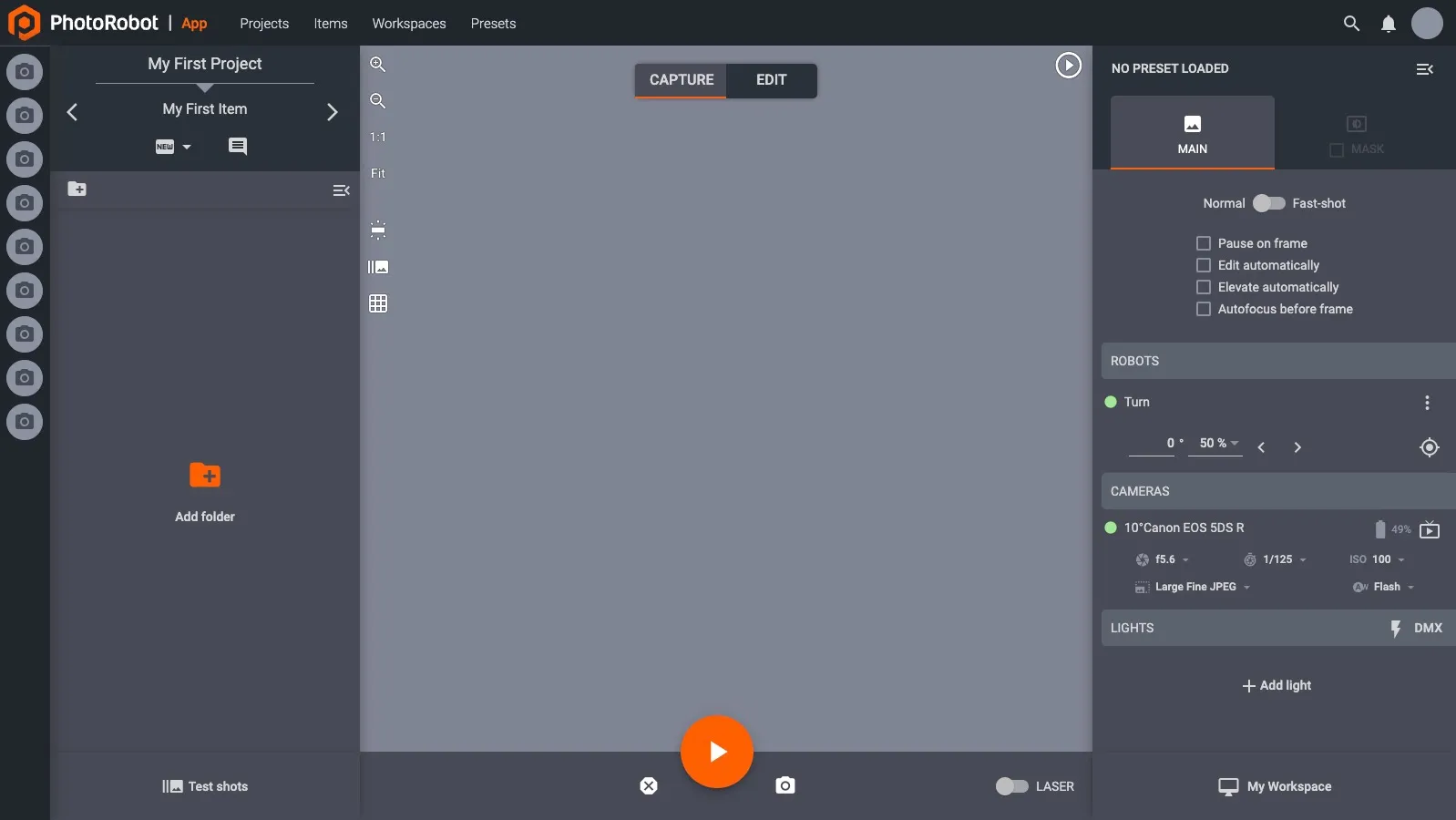
Norėdami sukurti darbo sritį, eikite į „Workspaces“ CAPP ir tada bakstelėkite kūrimo (+) mygtuką.
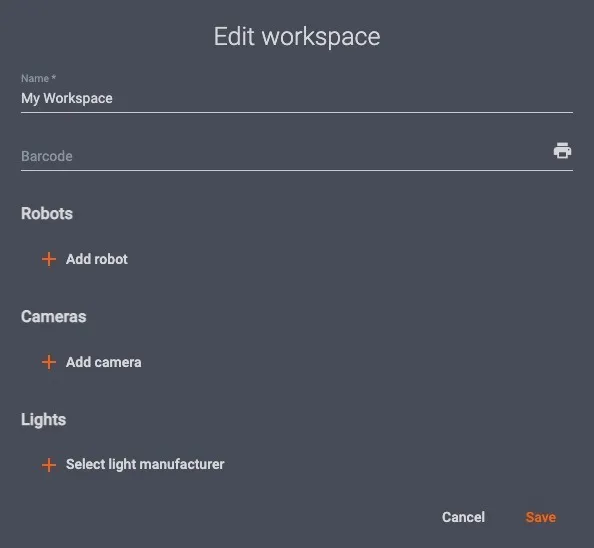
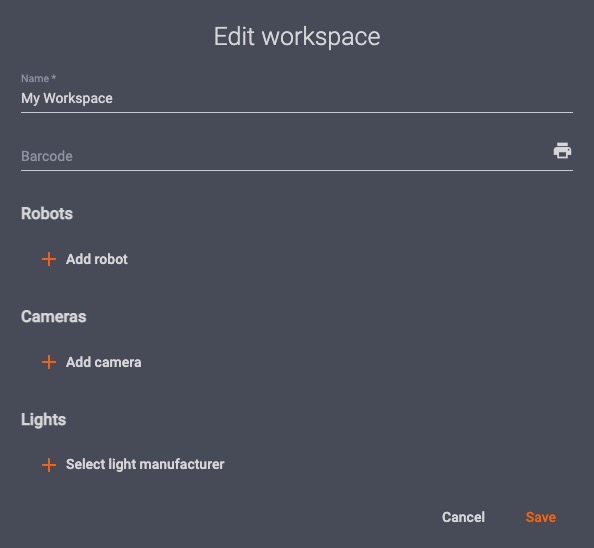
Paspaudus kūrimo mygtuką, atsidarys redagavimo darbo srities meniu, kuriame galima Pridėti robotą, Pridėti kamerą ir Pasirinkti šviesos gamintoją.
Atkreipkite dėmesį, kad prijungę techninės įrangos dalį (arba kamerą) prie darbo srities, iškart matysite, ar ji yra prisijungusi (atpažinta CAPP). Norėdami tai padaryti, patikrinkite taško spalvą kairėje nuo nurodytos įrangos pavadinimo. Jei įrenginys atpažintas, bus žalias taškas.

Arba pilkas taškas rodo, kad aparatinė įranga nebuvo atpažinta arba ji nėra įjungta. Jei yra raudonas taškas, yra klaida, pavyzdžiui, vartotojas neperjungė kameros į rankinį režimą. Norėdami nustatyti klaidos priežastį, užveskite pelės žymeklį ant raudono taško, kad būtų parodytas patarimas su įvykusios klaidos aprašymu.
Dėl dažniausiai pasitaikančių problemų ir jų sprendimų žr. „PhotoRobot“ trikčių šalinimo vadovą.
Pridėti robotą
Kitame žingsnyje įsitikinkite, kad visi fotosesijos robotai yra įjungti ir prijungti prie to paties vietinio tinklo kaip ir jūsų kompiuteris. Tada paspauskite Pridėti robotą.
- Paspauskite Pridėti robotą , kad pamatytumėte galimų robotų sąrašą.
- Pasirinkite robotus, kuriuos naudosite iš sąrašo.
"Fast-Shot" konfigūravimas
Norėdami suaktyvinti greito fotografavimo režimą, prijunkite visus robotus fotoaparatu per užrakto kabelį.
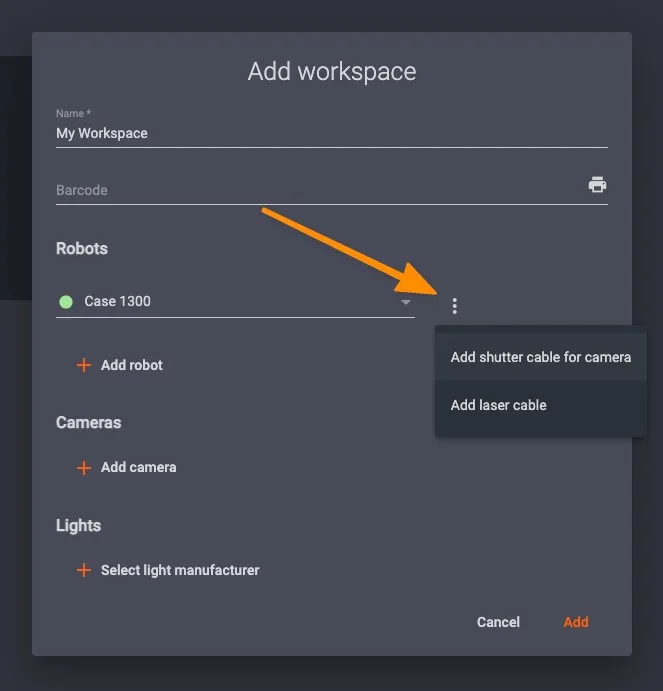
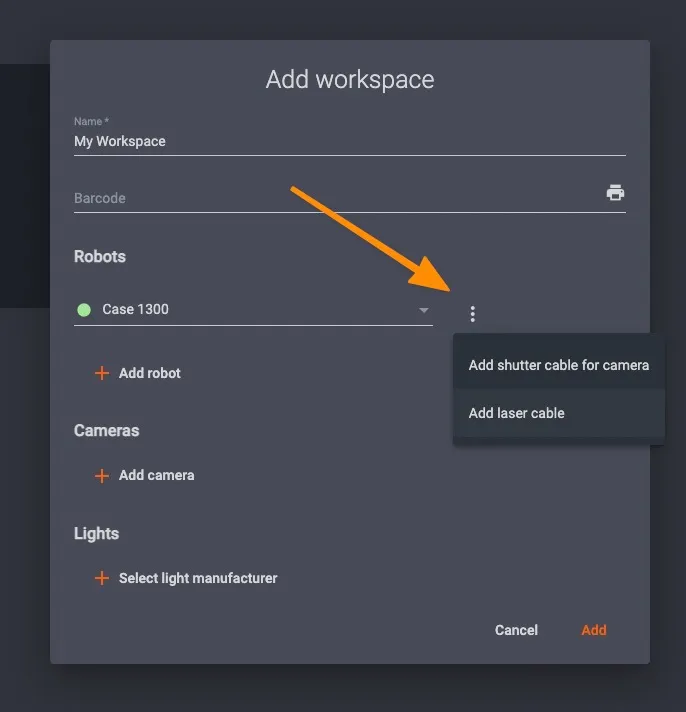
- Norėdami atidaryti fotoaparato meniu, spustelėkite Trys vertikalūs taškai į dešinę nuo roboto.
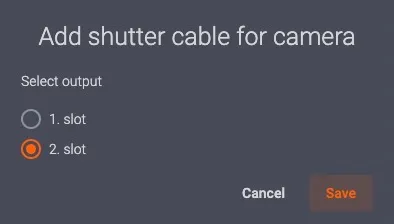
- Pasirinkite Pridėti užrakto kabelį fotoaparatui.
- Pasirinkite Išvesties lizdą (1 arba 2). Pasirinkite, kuris išvesties lizdas priklauso nuo fizinio užrakto kabelio laido. Kabeliams iš PhotoRobot naudokite 2 lizdą.
( ! ) - Kitiems gamintojams gali prireikti naudoti 1 lizdą.
Lazerių konfigūravimas
Atsižvelgiant į naudojamą aparatūrą, yra keletas lazerių konfigūravimo parinkčių:
Integruotiems lazeriams
Tiek "Case 850", tiek "1300" turi lazerines sistemas, sukurtas į robotą su nuline konfigūracija.
20 prievadų LaserBox
20 prievadų "LaserBox" yra atskiras įrenginys, leidžiantis valdyti kelis lazerius per tinklo ryšį. Norėdami sukonfigūruoti "LaserBox", pirmiausia įsitikinkite, kad jis įjungtas, tada įtraukite jį kaip kitą robotą į darbo sritį:
4 prievadų LaserBox
Jei prie roboto prijungtas 4 prievadų LaserBox, pasirinkite Pridėti lazerinį kabelį 3 taškų meniu elementuose, esančiuose dešinėje nuo roboto ID:
Fotoaparatų įtraukimas
Norėdami pridėti fotoaparatą, pirmiausia įsitikinkite, kad įrenginys įjungtas ir per USB prijungtas prie kompiuterio. Jei nenaudojate roboto, turinčio sūpynės funkciją (pvz., Roboto ranką ar rėmą), taip pat turėsite nustatyti kampą, kuriuo fotoaparatas bus nukreiptas į stalą.
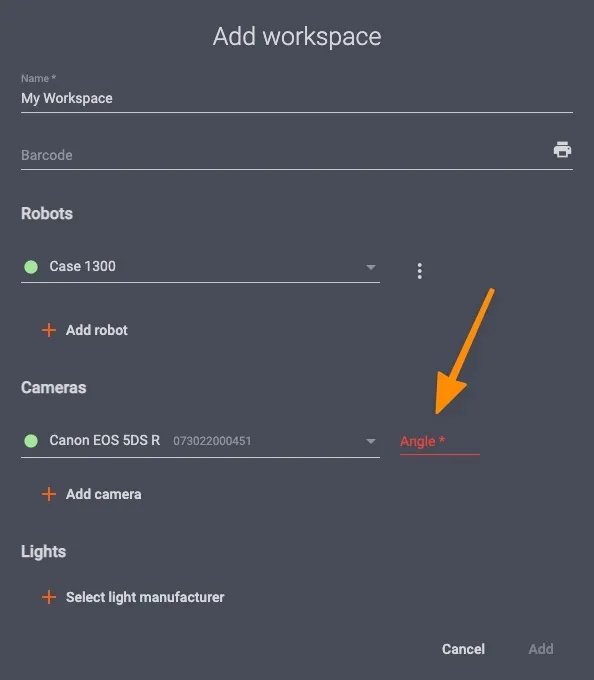
( ! ) - Kampo nustatymas robotams be pasukimo galimybės yra būtinas, kad veiktų tam tikros funkcijos, pvz., automatinis centravimas.
( * ) – Žr. visą PhotoRobot suderinamų kamerų sąrašą.
Konfigūruoti žibintus
Su PhotoRobot suderinamos šviesos sistemos apima dviejų tipų žibintus: strobo žibintus iš FOMEI ir Broncolor arba bet kokius LED žibintus su DMX palaikymu. Norėdami sukonfigūruoti apšvietimo sąranką darbo srities meniu, eikite į Šviesos ir įtraukite suderinamus žibintus į Pasirinkite šviesos gamintoją.
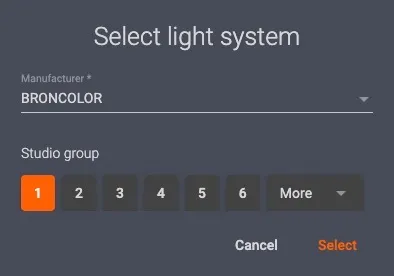
Blykstės - Broncolor
Norėdami nustatyti "Broncolor" žibintus, pirmiausia pasirinkite BRONCOLOR, tada pasirinkite iš "Studio" žibintų grupės, kurią norite kontroliuoti:
Stroboskopinės lempos - FOMEI
Fomei žibintams vartotojai turi dvi valdymo parinktis:
FOMEI LAN siųstuvas (pageidaujamas metodas)
Norėdami valdyti žibintus per FOMEI LAN siųstuvą, pirmiausia įsitikinkite, kad jis yra prisijungęs ir prijungtas prie jūsų tinklo.
Tada pasirinkite LAN. Tada, po LAN išskleidžiamajame meniu, pasirinkite Fomei LAN Transceiver.

FOMEI USB raktas (senesnė versija)
Taip pat galima valdyti šviesas su FOMEI "WiFi" rakteliu, prijungtu tiesiai prie kompiuterio per USB.
( ! ) Atminkite, kad šis metodas nebėra rekomenduojamas. Taip yra dėl to, kad kompiuteryje reikia įdiegti papildomas tvarkykles. FOMEI taip pat nebepalaiko naujesnių "MacOS" sistemų.
LED žibintai - DMX
Norėdami valdyti bet kokius LED žibintus, suderinamus su DMX protokolu, prijunkite šviesas per RJ45 arba USB kabelį prie roboto.
Tada galite pasirinkti Šviesos gamintoją DMX.
Vėliau fiksavimo ekrane sukursite individualią šviesą:
Kiekvienai lemputei galite sukonfigūruoti du kanalus:

- Ryškumo kanalas leidžia valdyti pasirinktos šviesos ryškumo lygį.
- Spalvų kanalą palaiko kai kurie žibintai ir leidžia reguliuoti spalvų lygius.


EOS sukilėlių serija


EOS DSLR serija


EOS M serija be veidrodžių


"PowerShot" serija


Iš arti / delninis

"Canon EOS Rebel" serija siūlo pradedantiesiems pritaikytus DSLR fotoaparatus su tvirta vaizdo kokybe, intuityviu valdymu ir universaliomis funkcijomis. Šie fotoaparatai, idealiai tinkantys fotografijos entuziastams, užtikrina patikimą automatinį fokusavimą, įvairaus kampo jutiklinius ekranus ir "Full HD" arba 4K vaizdo įrašymą.
Ryšys
Skiriamoji geba (MP)
Rezoliucija
"Canon EOS DSLR" serija užtikrina aukštos kokybės vaizdus, greitą automatinį fokusavimą ir universalumą, todėl idealiai tinka tiek fotografijai, tiek vaizdo įrašų gamybai.
Ryšys
Skiriamoji geba (MP)
Rezoliucija
"Canon EOS M Mirrorless" serija sujungia kompaktišką dizainą su DSLR panašiu našumu. Šios kameros su keičiamais objektyvais, greitu automatiniu fokusavimu ir aukštos kokybės vaizdo jutikliais puikiai tinka keliautojams ir turinio kūrėjams, ieškantiems perkeliamumo neprarandant vaizdo kokybės.
Ryšys
Skiriamoji geba (MP)
Rezoliucija
"Canon PowerShot" serija siūlo kompaktiškas, patogias kameras atsitiktiniams šauliams ir entuziastams. Su modeliais nuo paprastų taškų ir fotografavimo iki pažangių priartinimo kamerų, jie užtikrina patogumą, tvirtą vaizdo kokybę ir tokias funkcijas kaip vaizdo stabilizavimas ir 4K vaizdo įrašas.
Ryšys
Skiriamoji geba (MP)
Rezoliucija
"Canon" stambiu planu ir rankiniai fotoaparatai yra skirti detaliam, artimam fotografavimui ir vaizdo įrašams. Kompaktiški ir paprasti naudoti, jie siūlo tikslų fokusavimą, didelės skiriamosios gebos vaizdą ir universalias makrokomandų galimybes – puikiai tinka vaizdams rašyti tinklaraščius, fotografuoti produktus ir kurti stambiu planu.


