Darbo pradžia – PhotoRobot vartotojų palaikymas
PhotoRobot Controls App (toliau – „CAPP“) skirta automatizuoti turinio kūrimo procesus (vaizdus, vaizdo įrašus, 360 laipsnių ir 3D modelius). Šis vadovas susideda iš 4 skyrių, kurių kiekvienas atspindi procesą.
- NUSTATYMAS – Sukurkite darbo sritį: kameros, aparatinė įranga ir projektai
- CAPTURE - valdykite PhotoRobot aparatinę įrangą ir fotoaparatus, užfiksuokite vaizdus ir vaizdo įrašus
- REDAGUOTI – vaizdinis turinys po apdorojimo
- PUBLISH – Generuoti išvesties vaizdus keliais formatais, "tvarkyti profilius"
PhotoRobot valdiklių taikomosios programos diegimas
Norėdami įdiegti "PhotoRobot Controls" programą savo kompiuteryje, prisijunkite prie savo "PhotoRobot" paskyros ir eikite į "PhotoRobot Downloads".
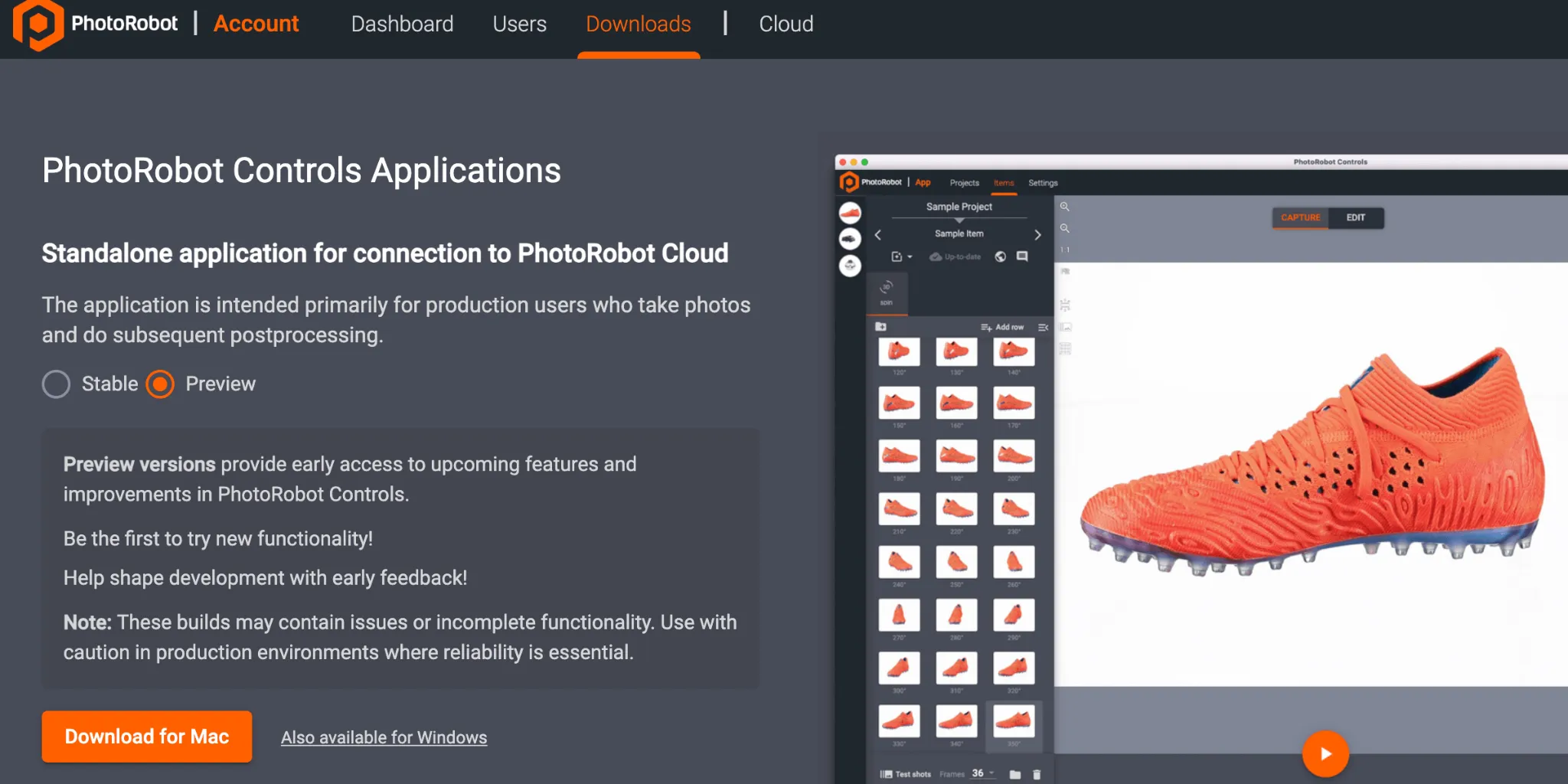
Nata: Tiek stabilią, tiek peržiūros CAPP versiją galima atsisiųsti naudojant diegimo vedlį. Stabilioje versijoje yra naujausia CAPP versija ir dažnai išleidžiamos versijos. Tuo tarpu peržiūros versija CAPP suteikia išankstinę prieigą prie pačių naujausių funkcijų ir pataisymų, kurie perkeliami į stabilią versiją per kelias dienas nuo kūrimo. Tai leidžia vartotojams išbandyti visas peržiūros versijoje kylančias problemas prieš kreipiantis į palaikymo tarnybą, nes dauguma praneštų stabilios versijos problemų jau buvo išspręstos peržiūros versijoje. Tačiau atminkite, kad peržiūros versija nerekomenduojama naudoti gamyboje, kurioje stabilumas yra labai svarbus veiksnys. Peržiūros versija yra aktyviai kuriama, joje vis dar gali būti neužbaigtų funkcijų arba neišspręstų klaidų.
Svarbus: Senesnės CAPP versijos nėra skirtos klientų ar viešam platinimui dėl duomenų bazės sugadinimo rizikos. Senesnės CAPP versijos yra prieinamos tik įgaliotiems "PhotoRobot" technikams vidiniam tobulinimui arba itin ypatingiems naudojimo atvejams.
Norėdami rasti naujausią stabilią ir peržiūros CAPP versiją, žr. Naujausios CAPP atsisiuntimo versijos.
Savarankiško diegimo palaikymas ir trikčių šalinimas
Diegimo procesas prasideda atsisiunčiant diegimo failą.
Atkreipkite dėmesį į CAPP įrengimo reikalavimus:
- Vartotojas turi turėti administratoriaus teises kompiuteryje, kuriame įdiegiamas CAPP.
- Kompiuteris turi atitikti visus "PhotoRobot" sistemos ir aparatūros reikalavimus.
- Kompiuteryje turi veikti palaikoma operacinė sistema su naujausiais naujinimais.
Svarbus: Taip pat atkreipkite dėmesį, kad CAPP susideda ne tik iš robotų valdymo funkcijų, bet ir iš kamerų, žibintų ir kitų periferinių įrenginių tvarkyklių. Dėl to dažnai naujausia "Mac OS" versija nėra iš karto palaikoma. Tačiau jei taip atsitiks, tai tik laikina ir tol, kol visi atitinkami pardavėjai išleis suderinamas bibliotekas.
Nors tai gali būti nepatogu, tai yra daug mažiau nepatogu nei suderinamumo problemos naudojant CAPP. Atnaujinimas taip pat yra dar sudėtingesnis nei išvengti priešlaikinio atnaujinimo.
Įvykdžius OS ir sistemos reikalavimus, diegimas tęsiamas naudojant diegimo vedlį. Prisijunkite prie "PhotoRobot" paskyros ir atlikite toliau nurodytus veiksmus.
Sąrankos
Vartotojo sutikimo patvirtinimas
Atsisiunčiant CAPP, norint suaktyvinti naują vartotojo paskyrą, reikia, kad vartotojas patvirtintų galutinio vartotojo licencijos sutartį (EULA) ir kitus susijusius dokumentus.
Suaktyvinus paskyrą, paskyros profilio nustatymuose bus galima peržiūrėti pateiktą sutikimo informaciją naudojant CAPP debesies versiją.
Norėdami patikrinti savo sutikimo informaciją, atidarykite CAPP debesies versiją ir spustelėkite vartotojo abonemento piktogramą viršutiniame dešiniajame sąsajos kampe. Tada meniu parinktyse pasirinkite Mano profilis .

Profilio meniu bus rodoma profilio nuotrauka, bendra vartotojo informacija (vardas, telefonas, įmonė), slaptažodžio nustatymai ir sutikimo informacija. Sutikimo informacija apima:
- Kompiuterio pagrindinio kompiuterio pavadinimas
- Sutarta data
- PhotoRobot Tarptautinės programos licencijos sutartis
- Sutikimas dėl asmens duomenų tvarkymo
- Informacija apie asmens duomenų tvarkymą
Suderinamos kameros
Svarbus: Norėdami užtikrinti, kad CAPP tinkamai bendrautų su fotoaparatu, uždarykite visas kitas programas, kurios jungiasi prie fotoaparato. Be to, būtinai naudokite suderinamą fotoaparatą iš PhotoRobot suderinamų fotoaparatų modelių sąrašo.
Pastaba: Nuo PhotoRobot Controls App 2.5.4 išleidimo bet kuri kamera dabar gali būti palaikoma per trečiųjų šalių kamerų integravimą. Tačiau automatizuotai fotografijai naujausi „Canon“ veidrodiniai fotoaparatų modeliai yra patikimiausi ir efektyviausi.
Nors galima naudoti PhotoRobot siūlomas kišenines kameras per "Wi-Fi" ar kabelinį ryšį, tai padarius gali kilti problemų.
- Gali būti dažnas "Wi-Fi" atjungimas (visų pirma dėl skirtojo laiko). Tam reikia daug laiko reikalaujančių pakartotinių prisijungimų prie sistemos.
- Jei naudojate rankinį fotoaparatą per kabelio jungtį, yra kabelio ilgio komplikacija ir rizika jungtims.
Jungiantis iPhone per PhotoRobot Touch App, atkreipkite dėmesį, kad nė viena iš šių problemų nepasitaiko. iPhone galės fotografuoti rankiniu būdu, naudojant nuolatinį apšvietimą. Tačiau, jei reikalinga blykstės fotografija, suderinamos rankinės kameros gali būti alternatyva rekomenduojamoms be veidrodinėms kameroms. Tiesiog turėkite omenyje problemas, kurios gali kilti su Wi-Fi ir laidiniais rankiniais modeliais.
Suderinami žibintai
Kad CAPP galėtų bendrauti su apšvietimu, būtinai naudokite PhotoRobot suderinamus studijos šviestuvus. Tai apima dviejų tipų šviestuvus: stroboskopinius šviestuvus iš FOMEI ir Broncolor, ir bet kokio tipo LED šviestuvus su DMX palaikymu.
Nuotolinio palaikymo sąranka
Iškart po PhotoRobot Controls įdiegimo rekomenduojama vartotojui atsisiųsti ir įdiegti Splashtop SOS (ES regiono) programėlę. Splashtop SOS (ES) leidžia PhotoRobot technikams pasiekti kliento kompiuterį ir teikti techninę pagalbą, kai vartotojas suteikia leidimą konkrečiam atvejui.
Atsisiunčiant „Splashtop SOS“ kartu su „PhotoRobot Controls“, bus išvengta vėlavimų teikiant nuotolinės techninės pagalbos užklausas. Pavyzdžiui, kai vartotojas neturi pakankamai teisių įdiegti programą. Įdiegus „Splashtop“, mūsų technikai gali iškart naudoti „Splashtop Business“, kad pasiektų kompiuterį su techninės pagalbos užklausa.
Tačiau atkreipkite dėmesį, kad vartotojas turi atsisiųsti ES regiono versiją „Splashtop SOS“ programėlės. JAV regiono versijos programėlė neleidžia mūsų technikams pasiekti jūsų kompiuterio.
Todėl, prašome įsitikinti, kad naudojate šią ES regiono nuorodą, norėdami atsisiųsti Splashtop SOS:
Pastaba: Daugiau informacijos apie nuotolinio palaikymo nustatymą PhotoRobot sistemoms rasite PhotoRobot nuotolinio palaikymo nustatymas.
Darbo srities kūrimas
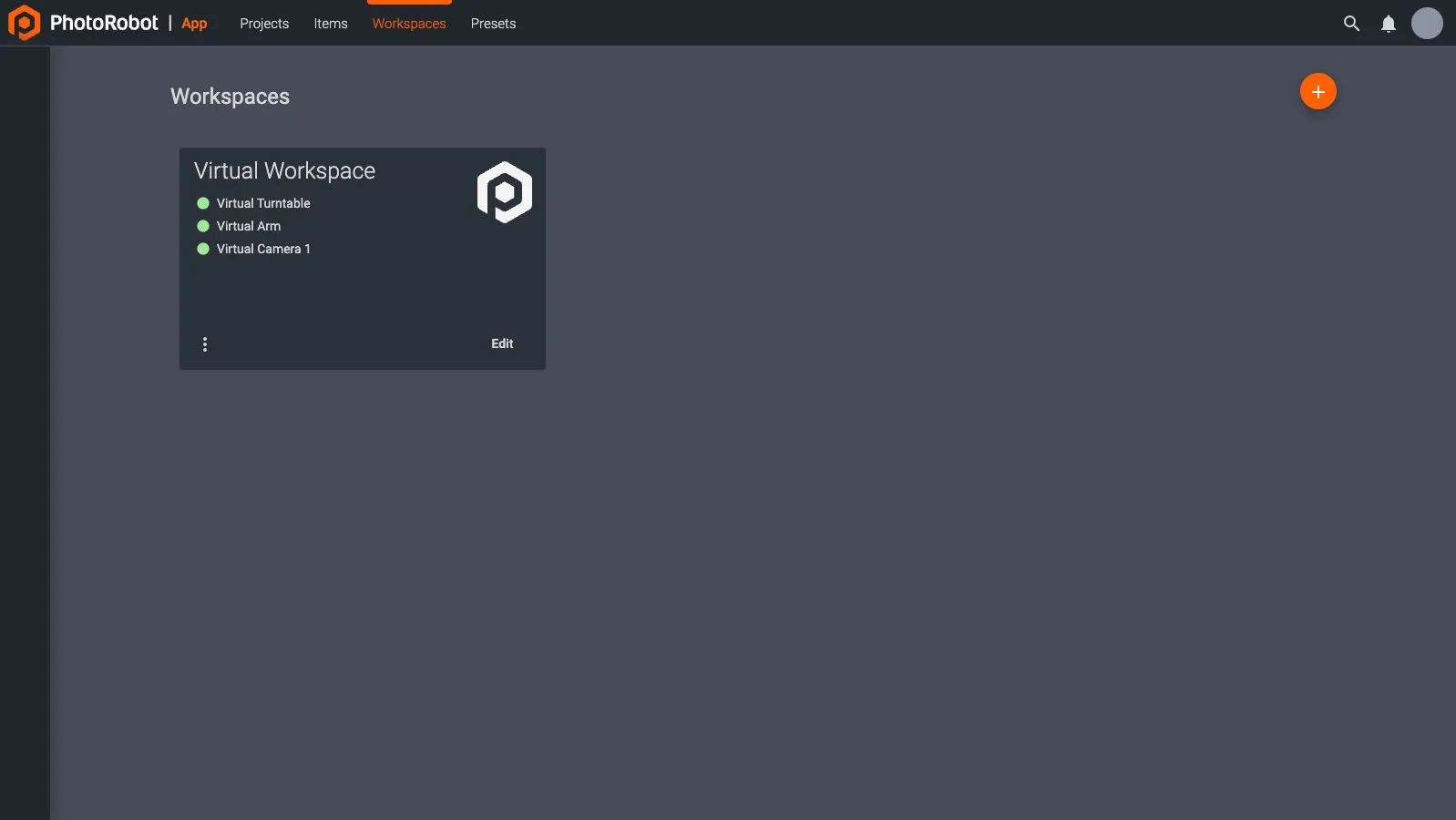
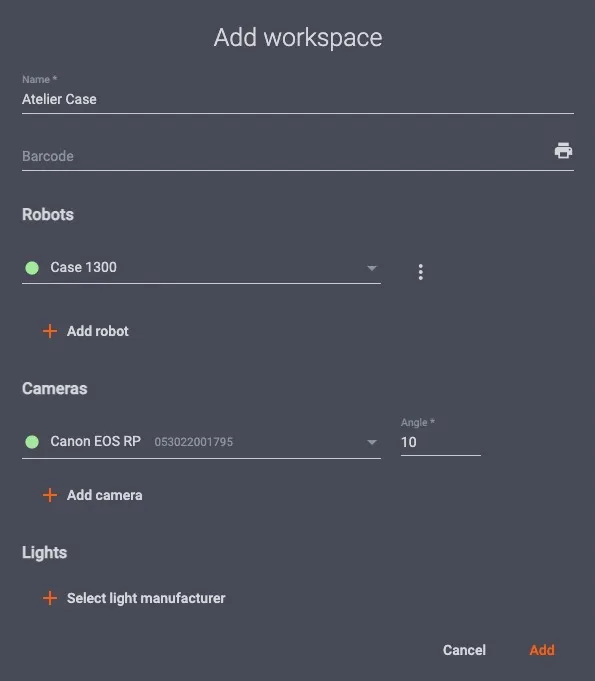
Atidarius CAPP, paprastai pirmas dalykas, kurį vartotojas daro, yra darbo srities kūrimas. Darbo sritis yra aparatūros, naudojamos konkrečiai fotosesijai, sąrašas. Tai gali būti įvairūs PhotoRobot moduliai, fotoaparatai, žibintai ir kiti priedai.
Demonstraciniais tikslais vartotojai gali dirbti su iš anksto nustatytu "Sample Workspace", kuris sukonfigūruotas naudoti virtualią aparatūrą. Tokiu būdu vartotojai vis dar gali eksperimentuoti su įvairiomis CAPP funkcijomis pasirinkdami virtualius robotus ir fotoaparatus.
Aparatūros prijungimas
Norėdami pradėti naudoti faktinę (o ne virtualią) aparatūrą, pirmiausia įsitikinkite, kad aparatūra prijungta prie to paties kompiuterių tinklo (arba potinklio), kaip ir kompiuteris, kurį naudojate PhotoRobot valdyti.
Pastaba: Nuo PhotoRobot Controls 2.5.4 versijos, bet kuri kamera dabar gali būti palaikoma per trečiųjų šalių kamerų integravimą. Tuo tarpu suderinamos kameros apima įvairius Canon kamerų modelius, mūsų rekomenduojamas Wi-Fi palaikančias Canon kameras, taip pat iPhone kameras, jei naudojama PhotoRobot Touch App.
Svarbu: Automatizuotai fotografijai naudojant ROBOTIC darbo vietą, PhotoRobot rekomenduojami beveidrodiniai Canon fotoaparatų modeliai yra patikimiausi. Nors yra palaikymas rankiniams fotoaparatams per Wi-Fi arba kabelinį ryšį, jų naudojimas gali sukelti problemų. Tai apima dažnus Wi-Fi atsijungimus (daugiausia dėl laiko limito), komplikacijas dėl kabelių ilgių ir ryšių riziką.
Norėdami prijungti fotoaparatą, jis turi būti prijungtas prie to paties vietinio kompiuterio tinklo kaip ir robotas vienu iš trijų būdų:
- Tiesioginis ryšys per USB prie vietinio tinklo;
- Rekomenduojamo rankinio fotoaparato prijungimas per specialų "Wi-Fi" protokolą (pasiekiamas "Canon" įrankio programoje "Canon" kūrėjo puslapyje);
- Vieno ar kelių "iPhone" integravimas naudojant "PhotoRobot Touch" programą. (Instrukcijas, kaip naudoti "iPhone" su PhotoRobot, rasite "iPhone Touch App" vartotojo vadove.)
Prijungę techninės įrangos (arba kameros) dalį prie darbo srities, galite patikrinti, ar ji yra prisijungusi (atpažįstama CAPP). Norėdami tai padaryti, patikrinkite tašką kairėje nuo nurodytos įrangos pavadinimo. Jei įrenginys atpažįstamas, bus žalias taškas.
Pilkas taškas šalia įrenginio pavadinimo rodo, kad aparatinė įranga nebuvo atpažinta arba nėra įjungta. Jei yra raudonas taškas, yra klaida, pavyzdžiui, vartotojas neperjungė kameros į rankinį režimą. Norėdami nustatyti klaidos priežastį, užveskite pelės žymeklį ant raudono taško, kad būtų parodytas patarimas su klaidos aprašymu.
Išsamų nuoseklų vadovą, kaip prijungti aparatinę įrangą ir nustatyti darbo vietą, rasite „PhotoRobot“ darbo vietos nustatymas.
Jei kyla problemų, ieškokite sprendimų PhotoRobot trikčių šalinimo vadove, kur rasite dažniausiai pasitaikančias problemas ir jų sprendimus.
Roboto rankos aukščio nustatymas
Jei darbo srityje naudojate roboto ranką, atminkite, kad greičiausiai reikės papildomos sąrankos. Taip yra todėl, kad robotinė ranka yra nepriklausoma mašina, o viena iš jos valdymo per CAPP funkcijų yra ta, kad aukščio judesys suderina sukimosi ašį su fotografuojamo objekto aukščio vidurio tašku.
Roboto rankos sukimosi ašies aukštį lemia darbo vietos mašinos tipas, o tuo pačiu ir išlyginamųjų pėdų reguliavimas, kuris kompensuoja bet kokius grindų nelygumus. Jei viskas nustatyta teisingai, mašina yra lygi, o sukimosi centras yra tam tikrame aukštyje virš grindų. Tačiau bendras aukštis taip pat priklausys nuo patefono paviršiaus aukščio, kuris skiriasi tarp skirtingų robotų. Tai reiškia, kad aukščio atskaitos taške gali būti neatitikimų, nes po roboto rankos stulpeliu yra aukščio adapteris, kad jis maždaug sulygiuotų.
Norint užtikrinti tobulą išlyginimą, reikia įvesti aukščio skirtumą tarp rankos ir patefono į CAPP. Aukščio skirtumas matuoja tikslų atstumą tarp roboto rankos sukimosi ašies ir aukščio, kuriame yra besisukančio stalo paviršius (įskaitant bet kokią papildomą lentą, uždėtą ant jos). Tai suteikia tikslius matmenis, iš kurių sistema apskaičiuoja pusę objekto aukščio, ir padėtį, kurioje ranka turėtų judėti. Tai taip pat užtikrina, kad sistema būtų nustatyta automatiškai ir tinkamai.
Taip pat atkreipkite dėmesį: Sistema nustatyta atmesti reikšmes, kurios nepatenka į tam tikros sąrankos galiojantį diapazoną.
Nustatykite ROBOTIC ARM keltuvą į nulinį lygį
Norėdami nustatyti Robot ARM keltuvą į nulinį lygį, pirmiausia atidarykite vietinę CAPP versiją ir pasiekite Darbo srities nustatymus vienu iš dviejų būdų:
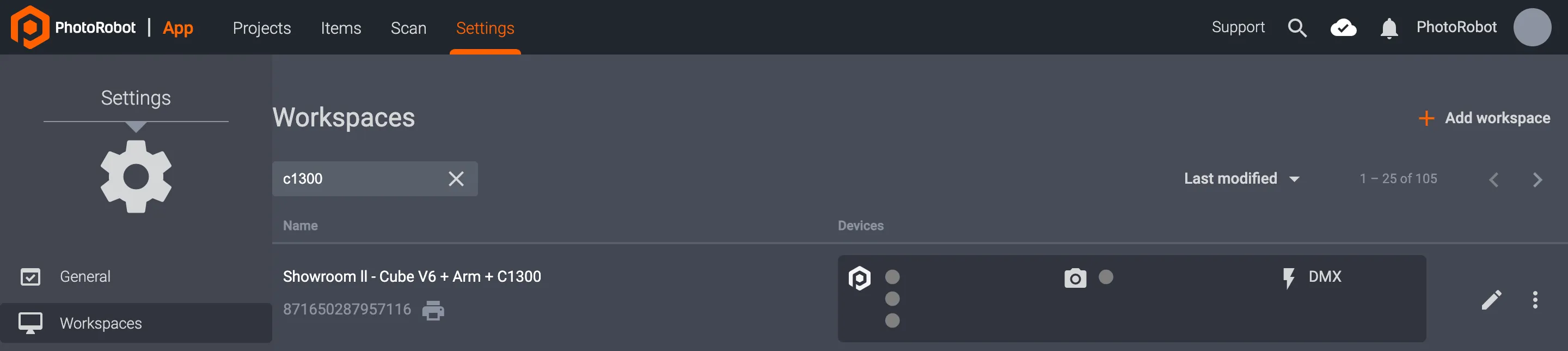
1. Atidarykite vietinę CAPP versiją, sąsajos viršuje spustelėkite Nustatymai ir pasirinkite Darbo sritys iš kairiojo meniu parinkčių. Šiame meniu raskite veikiančią darbo sritį ir spustelėkite redagavimo piktogramą šalia darbo srities pavadinimo, kad atidarytumėte Redaguoti darbo srities nustatymus:
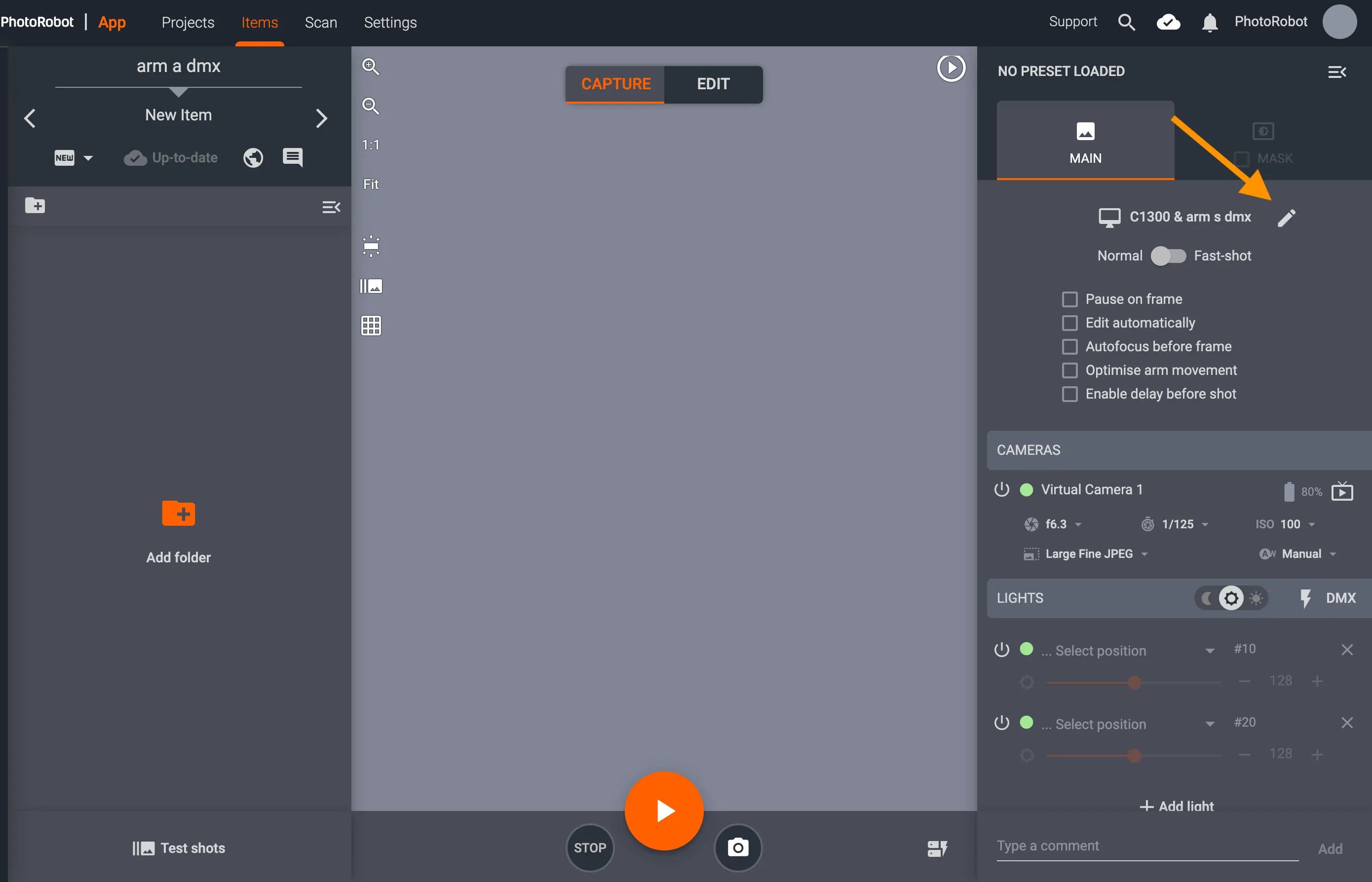
2. Arba galima pasiekti Redaguoti darbo sritį meniu atidarius elementą fiksavimo režimu vietinėje CAPP versijoje ir spustelėjus redagavimo piktogramą šalia Darbo srities pavadinimo dešinėje sąsajos pusėje:
Bet kuris metodas atvers Redaguoti darbo srities nustatymus. Tada, norėdami sukonfigūruoti roboto ranką, raskite įrenginį meniu Robotai ir spustelėkite 3 vertikalius taškus šalia roboto rankos pavadinimo.
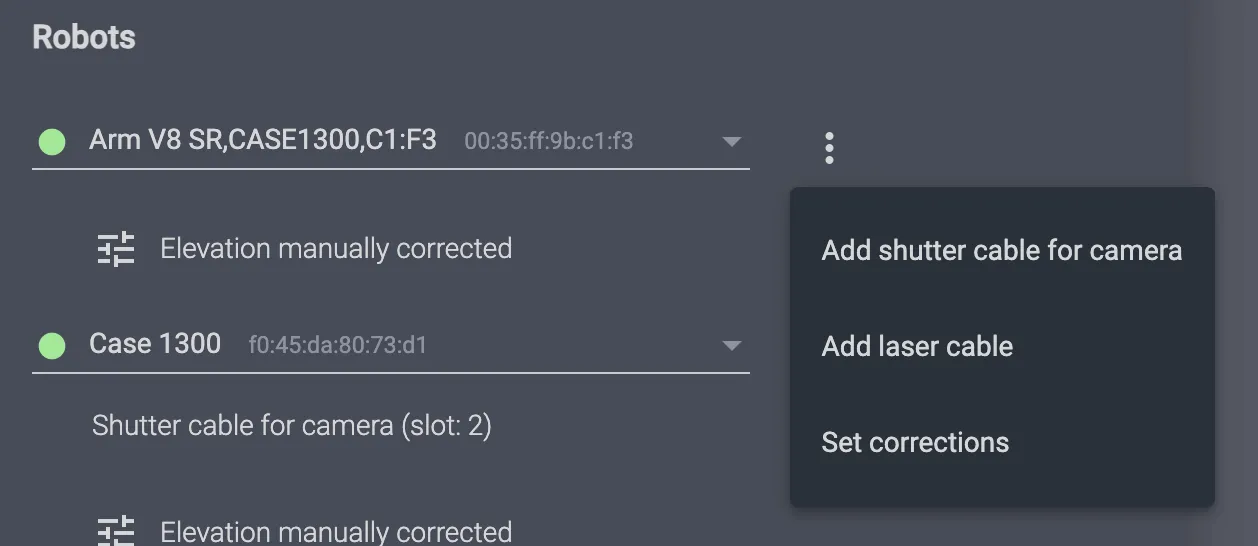
Tada pasirinkite meniu parinktį Nustatykite pataisymus , kad atidarytumėte funkciją Nustatyti lifto korekciją :
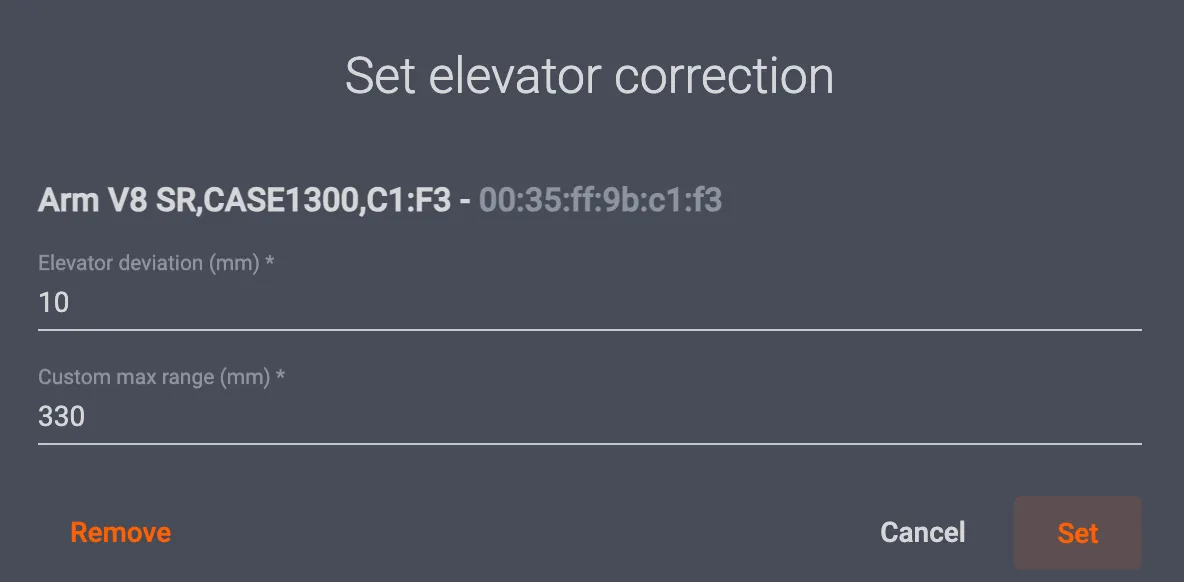
Meniu Nustatyti lifto korekciją sureguliuokite skaičių viršutiniame lauke Lifto nuokrypis (mm), kad nustatytumėte fotoaparato aukštį į atitinkamą nulinį lygį. Pavyzdžiui, jei fotoaparatas yra ne centre 10 mm virš stalo, nustatykite lifto nuokrypį į -10 mm, kad fotoaparatas būtų centruotas.
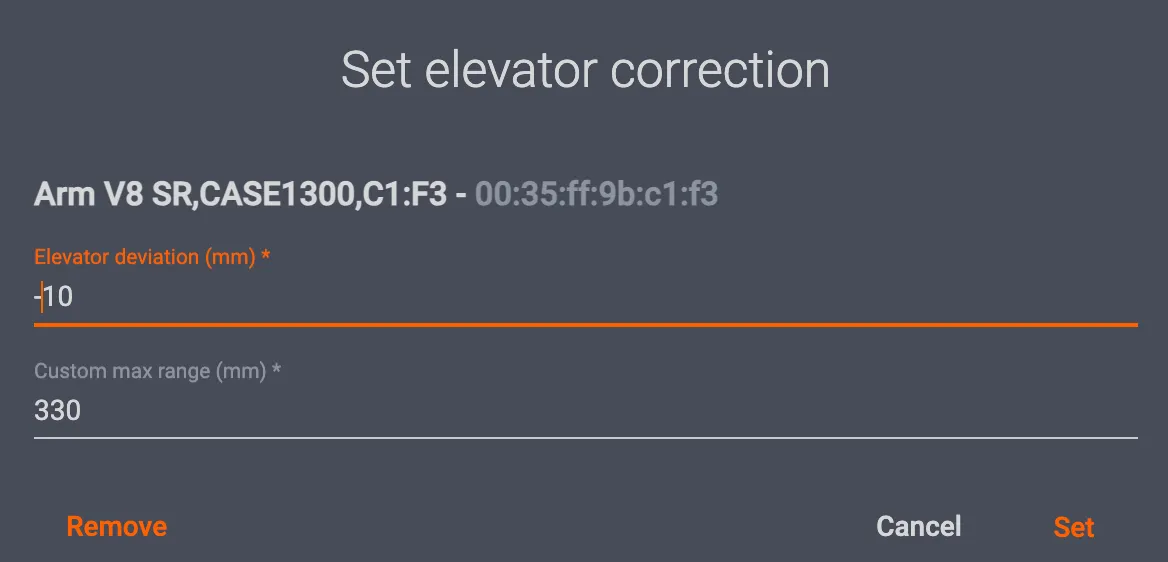
Jei fotoaparatas yra ne centre 10 mm žemiau stalo, nustatykite lifto nuokrypį į +10 mm. Tai teisingai suderins sumontuotos kameros aukštį ant roboto rankos iki atitinkamo nulinio lygio programinėje įrangoje.
Nata: Keltuvas gali pasiekti ne daugiau kaip 330 mm. Taigi, reguliuojant nulinį lygį +30 mm, maksimalus pakėlimas gali siekti tik 300 mm. Tai reiškia, kad sistema galės fiksuoti tik tuos produktus, kurie yra mažesni, 30 mm ar mažesni.
Failų valdymas – projektai, elementai ir aplankai
BŽŪPP vaizdai suskirstomi į projektus, elementus ir aplankus.
- Projektas yra aukščiausio lygio duomenų objektas. Paprastai projekte bus elementų iš vienos fotosesijos arba galbūt vienos fotografavimo dienos / savaitės.
- Projektai susideda iš vieno ar kelių elementų. Vienas elementas paprastai bus konkretus, fotografuotas objektas.
- Elemente yra vienas ar daugiau aplankų. CAPP galite turėti kelis aplankus viename elemente, kad skirtingų tipų vaizdai būtų atskirti. Labai dažnas pavyzdys yra turėti vieną aplanką 360° besisukančiam pristatymui (vadinamam "sukimu"), o kitą naudoti nejudantiems vaizdams saugoti ("kadrai").
Norėdami pradėti fotografuoti, pirmiausia turite pridėti naują projektą (nebent jau turite tokį, kurį norėtumėte naudoti), taip pat bent vieną elementą.
( ! ) - Jei kyla problemų, raskite papildomą palaikymą fotoaparatų, robotų, šviesų prijungimui ir redagavimui PhotoRobot trikčių šalinimo vadove.
Bendrieji nustatymai - automatinis kopijavimas debesyje, apdorojimas, jutiklinė programa
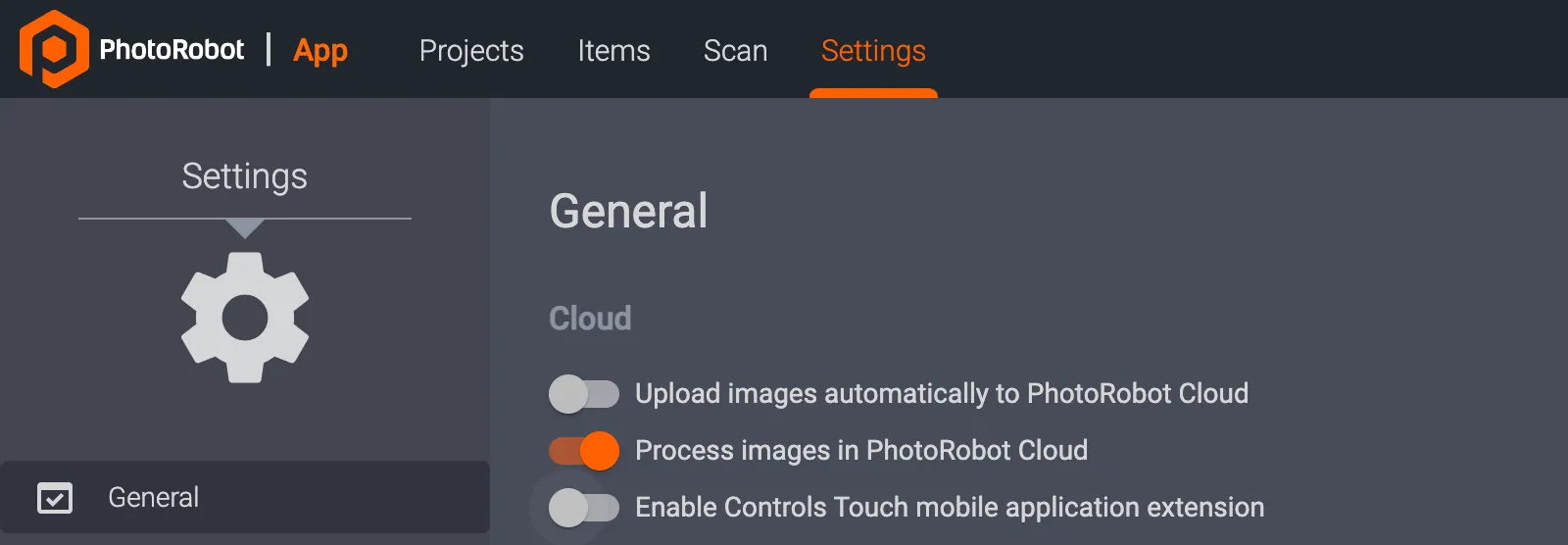
Vietinėje CAPP darbalaukio versijoje yra 3 bendrieji nustatymai, kuriuos reikia įjungti arba išjungti:
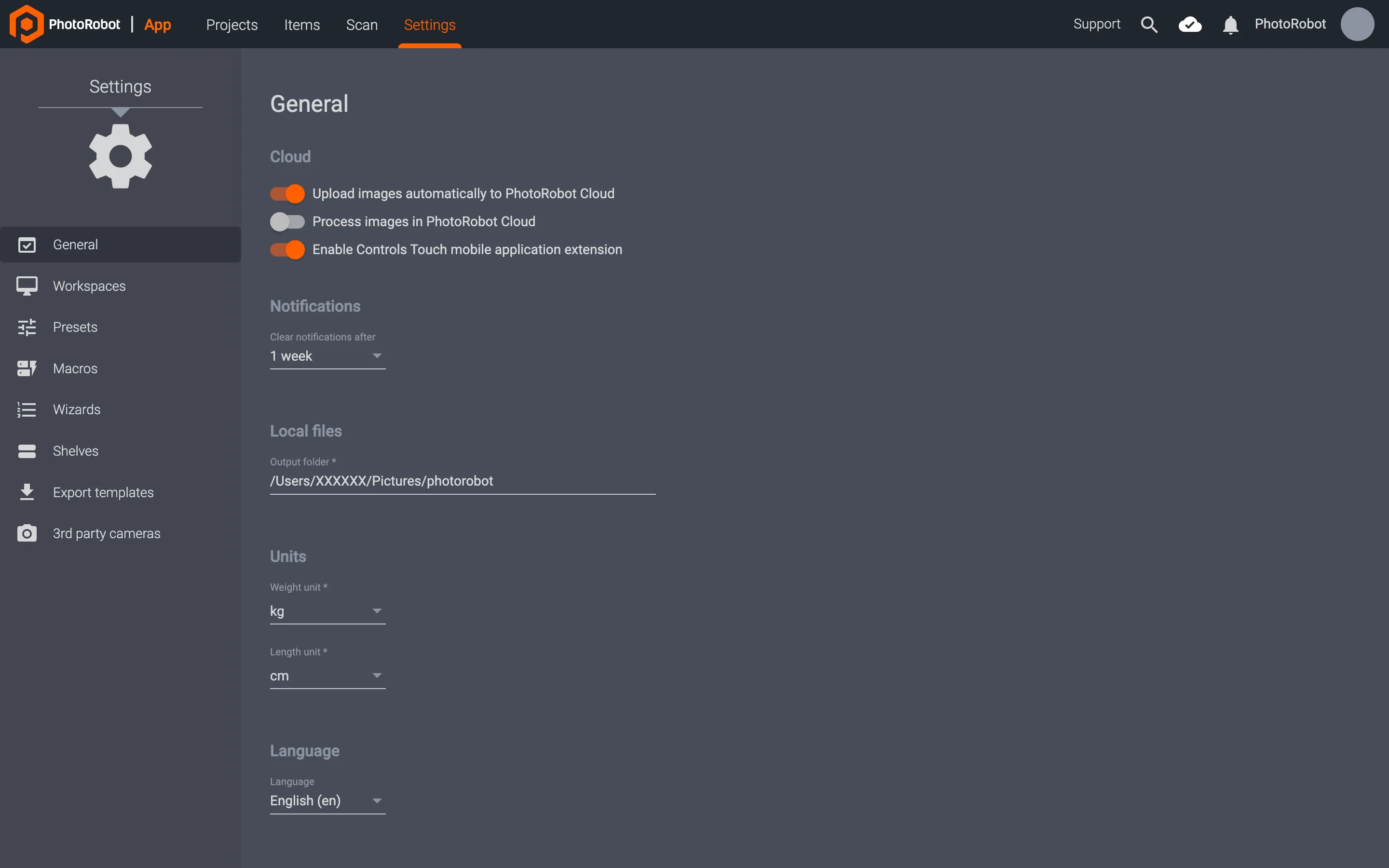
- Automatinis vaizdų įkėlimas į "PhotoRobot Cloud"
- Apdorokite vaizdus "PhotoRobot Cloud".
- Įgalinti valdiklius Palieskite Mobiliosios programos plėtinys
Pagal numatytuosius nustatymus vietinė programa bus nustatyta kaip Automatiškai įkelti vaizdus į PhotoRobot Cloud". Ši funkcija automatiškai išsaugo užfiksuotų vaizdų atsarginę kopiją debesies serveryje, kad vėliau būtų galima eksportuoti.
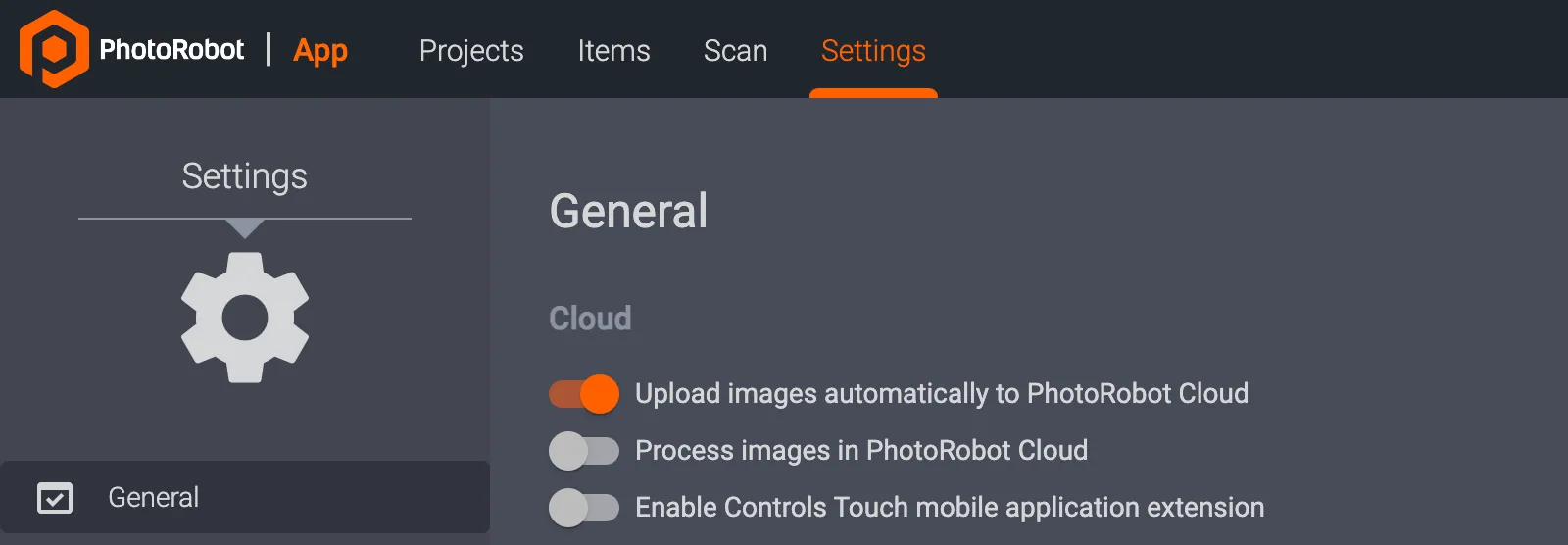
Norėdami išjungti Automatiškai įkelti vaizdus į PhotoRobot Cloud", išjunkite parinktį vietinėje CAPP bendrųjų nustatymų versijoje. Vietoj to užfiksuoti elementai bus išsaugoti vietinėje programoje arba jūsų debesies paskyroje.
Taip pat naudokite jungiklius, kad įjungtumėte arba išjungtumėte funkciją Apdoroti vaizdus PhotoRobot debesyje. Kai įjungta, ši funkcija automatiškai apdoroja vaizdus pagal išankstinius nustatymus PhotoRobot debesyje po užfiksavimo.
Jei naudojate "PhotoRobot Touch Mobile App", skirtą "iPhone", įjunkite "Enable Controls Touch Mobile Application Extension".
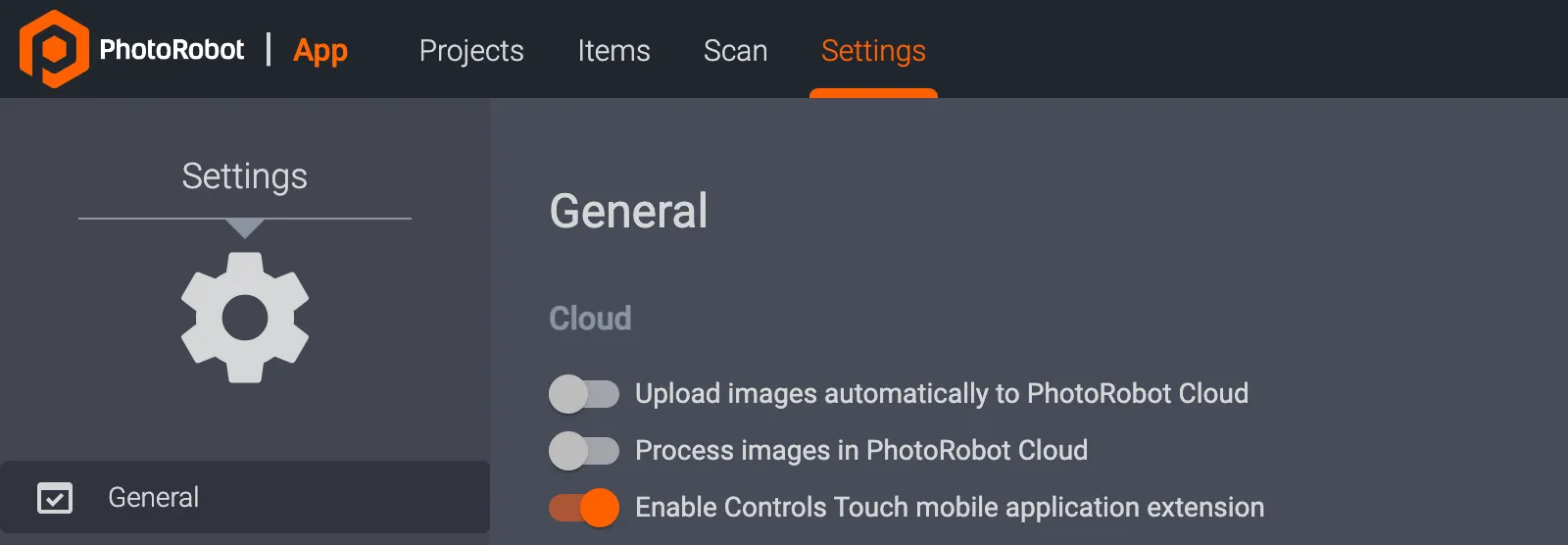
Nata: Techninių instrukcijų, kaip įdiegti ir naudoti "PhotoRobot Touch", ieškokite "PhotoRobot iPhone Touch App" vartotojo vadove.
Bendrieji parametrai - Automatinis naujo elemento kūrimas
Be to, vietinės CAPP darbalaukio versijos bendruosiuose nustatymuose yra brūkšninių kodų skaitytuvo nustatymai, leidžiantys konfigūruoti išplėstines brūkšninių kodų skaitytuvo parinktis. Naudokite jungiklį kairėje nuo Automatiškai kurti naują elementą sistemoje, kai nuskaitomas nežinomas brūkšninis kodas , kad įjungtumėte arba išjungtumėte automatinį elemento kūrimą.
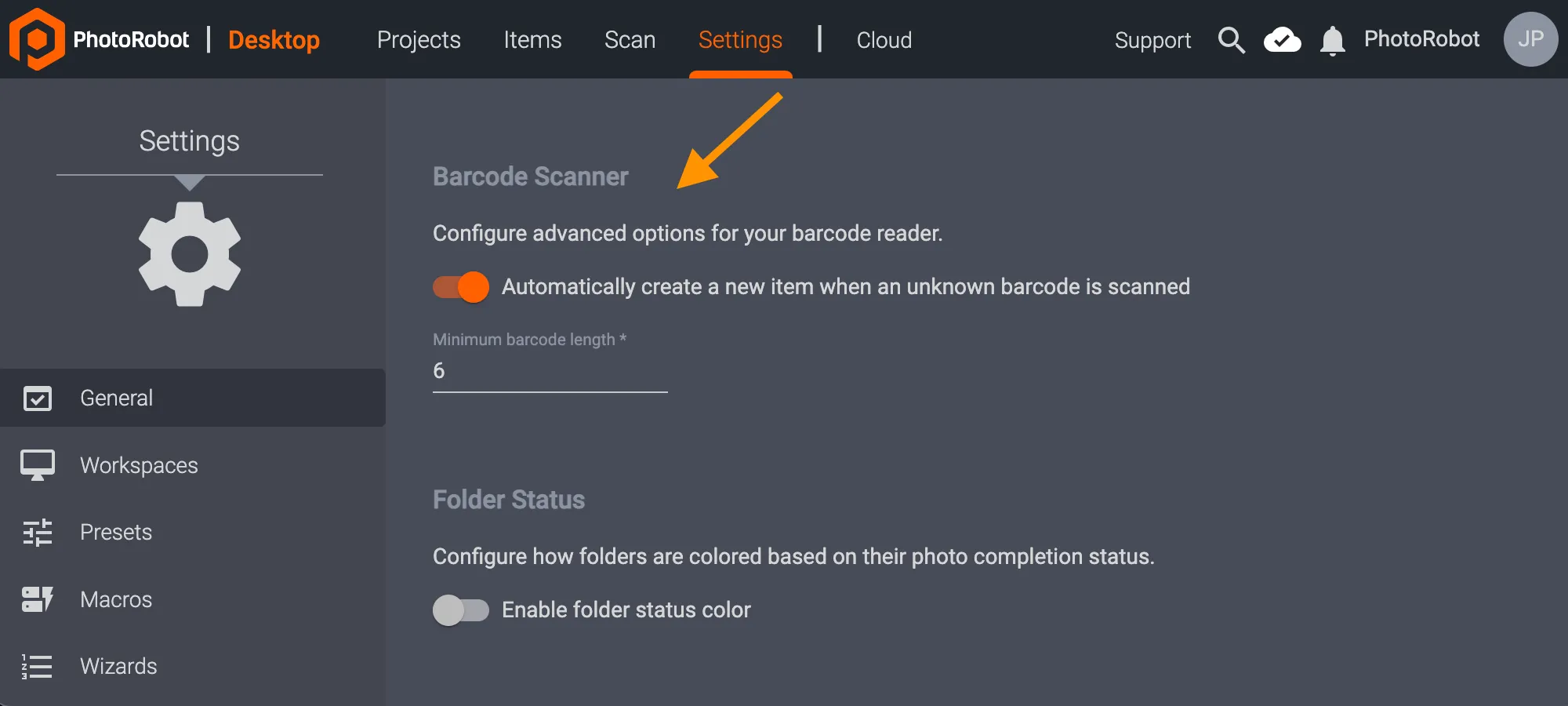
Kai aktyvus, nustatymas veiks kaip alternatyva rankiniam elementų kūrimui. Tai leidžia identifikuoti daiktą fiksavimo vietoje (paprastai naudojant brūkšninį kodą arba QR kodą). Operatorius tiesiog nuskaito nežinomą kodą, o projekte automatiškai sukuriamas naujas elementas. Prekės pavadinimas bus nurodytas pagal nuskaitytą eilutę ir prekės identifikatoriaus lauke. Tada operatorius nufotografuoja daiktą.
Tokiu būdu studijos programinėje įrangoje nereikia atlikti jokių su inventoriumi susijusių operacijų. Pavyzdžiui, pakanka nuskenuoti naują daiktą ir vėliau nuskaityti iš anksto nustatytą (lentynos) kodą fotografijai (pvz., baltiems, tamsiems ar spalvotiems daiktams). Tada sistema automatiškai ir nedelsdama pristatys visą nuotraukų rinkinį, jas visiškai apdoros ir paskirstys su automatiniu pavadinimu tikslinei sistemai.
Be to, nuo CAPP 2.13.beta58 versijos dabar yra galimybė sukonfigūruoti minimalų brūkšninių kodų eilutės ilgį. Anksčiau minimalus brūkšninio kodo / QR kodo ilgis buvo 6 simboliai (kad būtų išvengta dvigubo nuskaitytos eilutės interpretavimo). Dabar minimalaus brūkšninio kodo ilgio nustatymas yra reguliuojamas, kad, pavyzdžiui, keturių simbolių identifikatoriai veiktų be papildomų koregavimų.
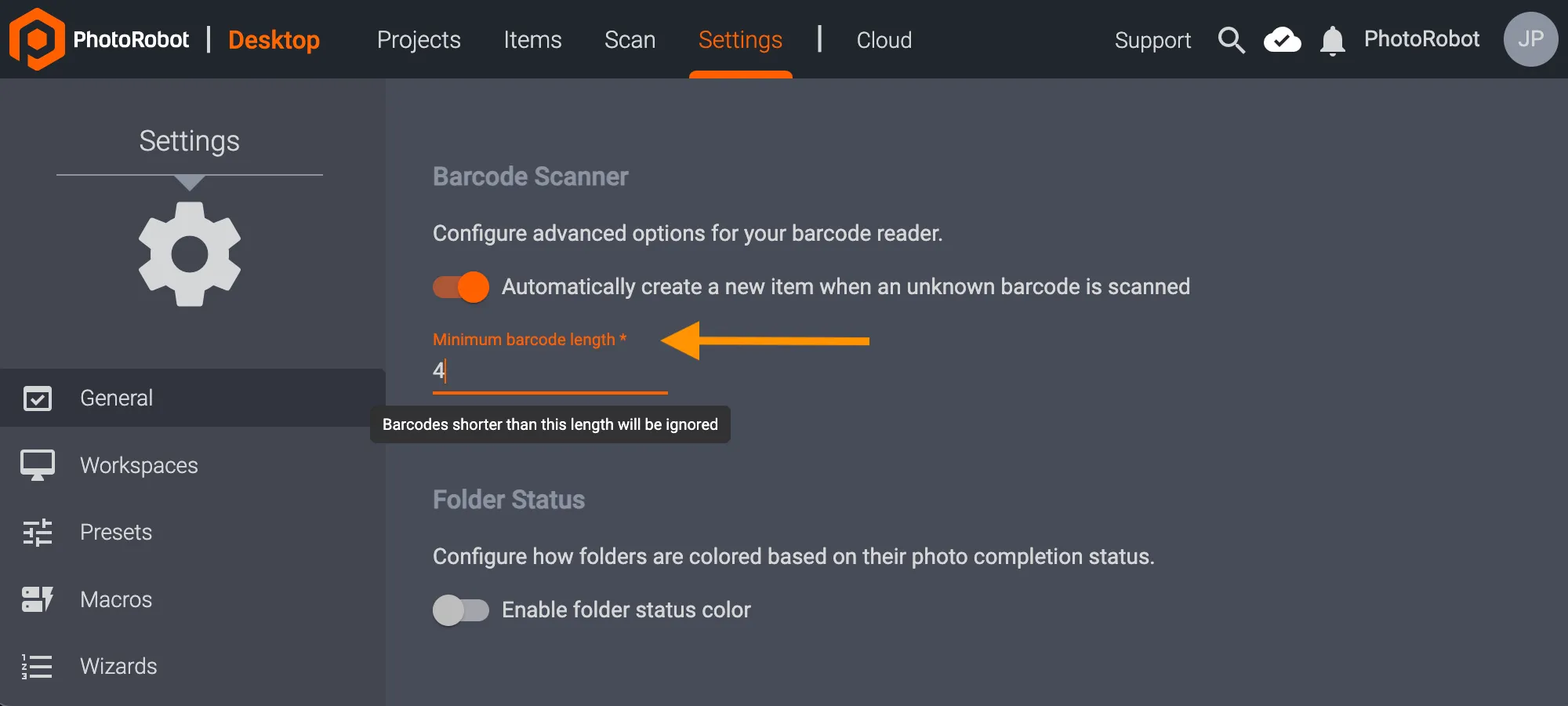
Norėdami reguliuoti minimalų brūkšninių kodų / QR kodų eilutės ilgį, sukonfigūruokite minimalų brūkšninio kodo ilgį ir vietinėje CAPP versijoje Bendrieji nustatymai - Brūkšninių kodų skaitytuvas. Tada sistema nepaisys brūkšninių kodų, kurie yra trumpesni už įvestą ilgį.
Nata: Kai prekei sistemoje bus priskirtas brūkšninis kodas, brūkšninis kodas taip pat bus pasiekiamas tiesiogiai fiksavimo režimo sąsajoje prekės informacijos srityje per brūkšninio kodo mygtuką.
Išorinės prieigos prie projekto duomenų suteikimas klientui
Norėdami dirbti su klientais, nepriklausančiais mokamos CAPP paskyros organizacijai, paskyros administratorius gali nemokamai susikurti klientų paskyras. Kliento paskyros leidžia išoriniam klientui peržiūrėti projekto duomenis, dalyvauti kokybės užtikrinime peržiūrint ir komentuojant bei pasiekti projekto išteklius atsisiųsti. Ši funkcija skirta situacijoms, kai fotostudija dirba su išoriniu klientu, kuriam reikalinga prieiga prie konkrečių darbų.
Norėdami bendrinti projektą su klientu, nepriklausančiu jūsų organizacijai, pirmiausia įsitikinkite, kad prisijungėte prie CAPP debesies versijos naudodami vartotojo profilį su administratoriaus teisėmis.
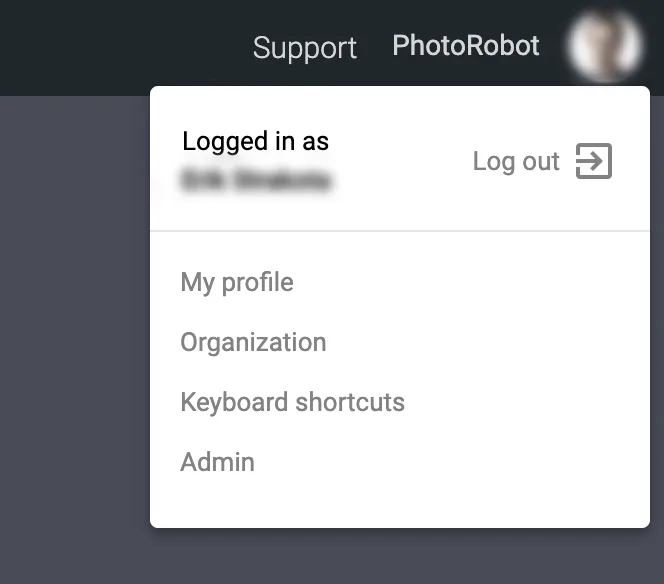
1. Prisijunkite prie debesies programos naudodami mokamą CAPP paskyros profilį su administratoriaus teisėmis ir spustelėkite vartotojo profilio meniu piktogramą viršutiniame dešiniajame prietaisų skydelio kampe. Tada spustelėkite Organizacija , kad pasiektumėte administravimo skydelį.
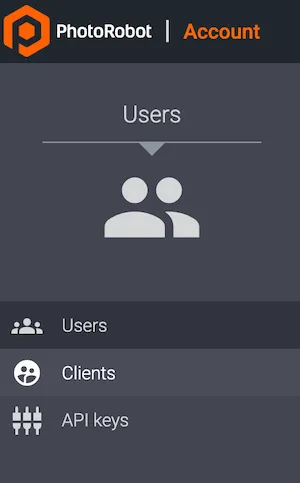
2. Tada organizacijos administravimo skydelyje spustelėkite Vartotojai iš paskyros parinkčių vartotojo sąsajos viršuje.

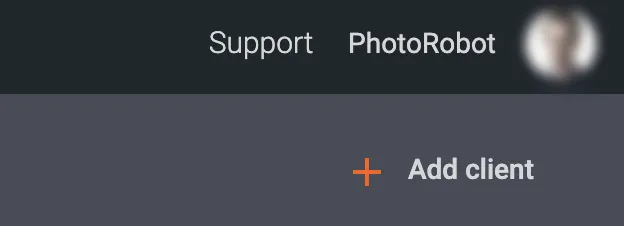
3. Spustelėkite Klientai , kad sukurtumėte naują vartotojo parinktį, kad galėtumėte pasiekti klientų pridėjimo funkciją iš paskyros sąsajos. Mygtukas + Pridėti klientus bus rodomas ataskaitų srities viršuje, dešinėje, po vartotojo profilio piktograma.
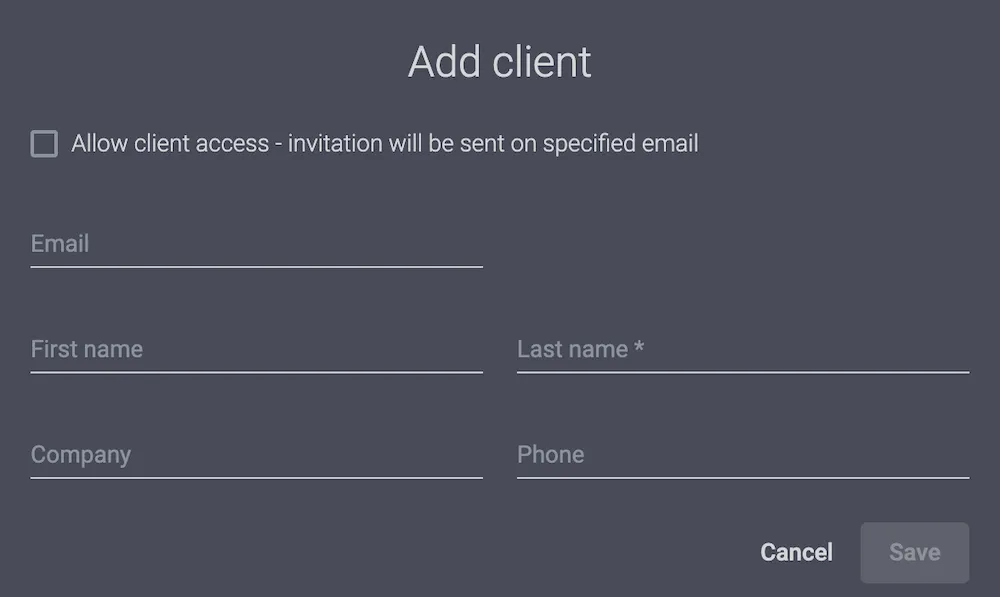
4. Spustelėkite + Pridėti klientą po vartotojo profilio piktograma.
5. Užpildykite kliento informacijos laukus (el. pašto adresas, vardas, įmonė, telefonas) ir pažymėkite langelį Leisti kliento prieigą. Peržiūrėkite informacijos tikslumą ir spustelėkite Įrašyti , kad įtrauktumėte klientą į CAPP.
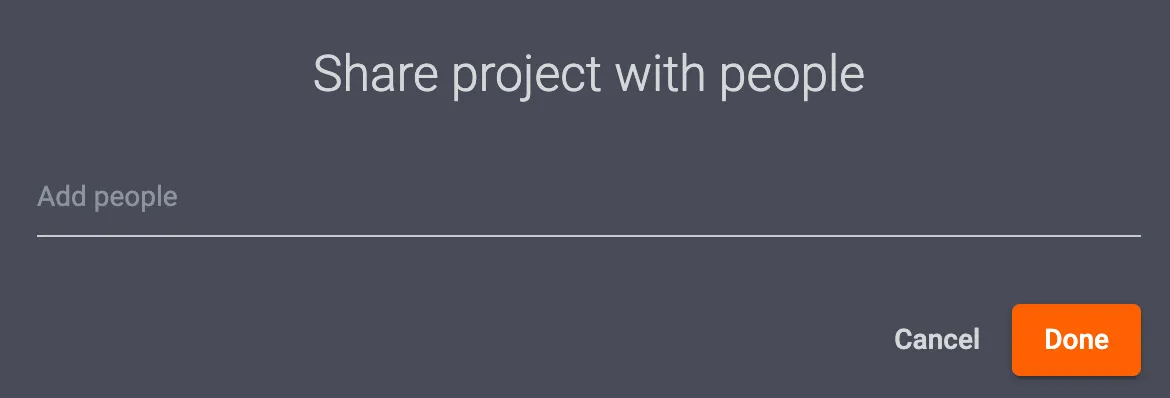
6. Atidarykite projektus debesies CAPP versijoje, raskite projektą, kurį norite bendrinti su išsaugotu klientu, užveskite pelės žymeklį virš projekto juostos ir spustelėkite bendrinimo piktogramą projekto informacijos dešinėje.
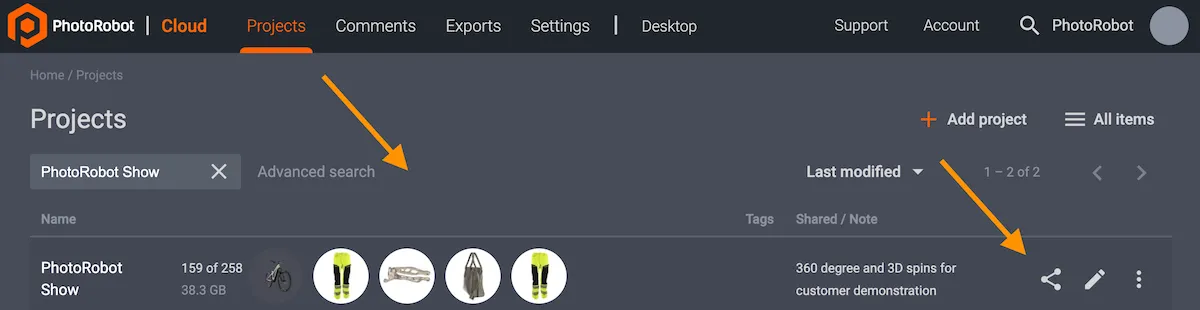
7. Spustelėkite bendrinimo piktogramą dešinėje projekto juostos pusėje, kad atidarytumėte funkciją Bendrinti projektą su žmonėmis , pasirinkite išsaugotus klientus ir spustelėkite Atlikta. Dabar projektas bendrinamas su klientu, todėl jis gali peržiūrėti darbą ir komentuoti CAPP kokybės užtikrinimui ir prireikus papildomoms instrukcijoms.
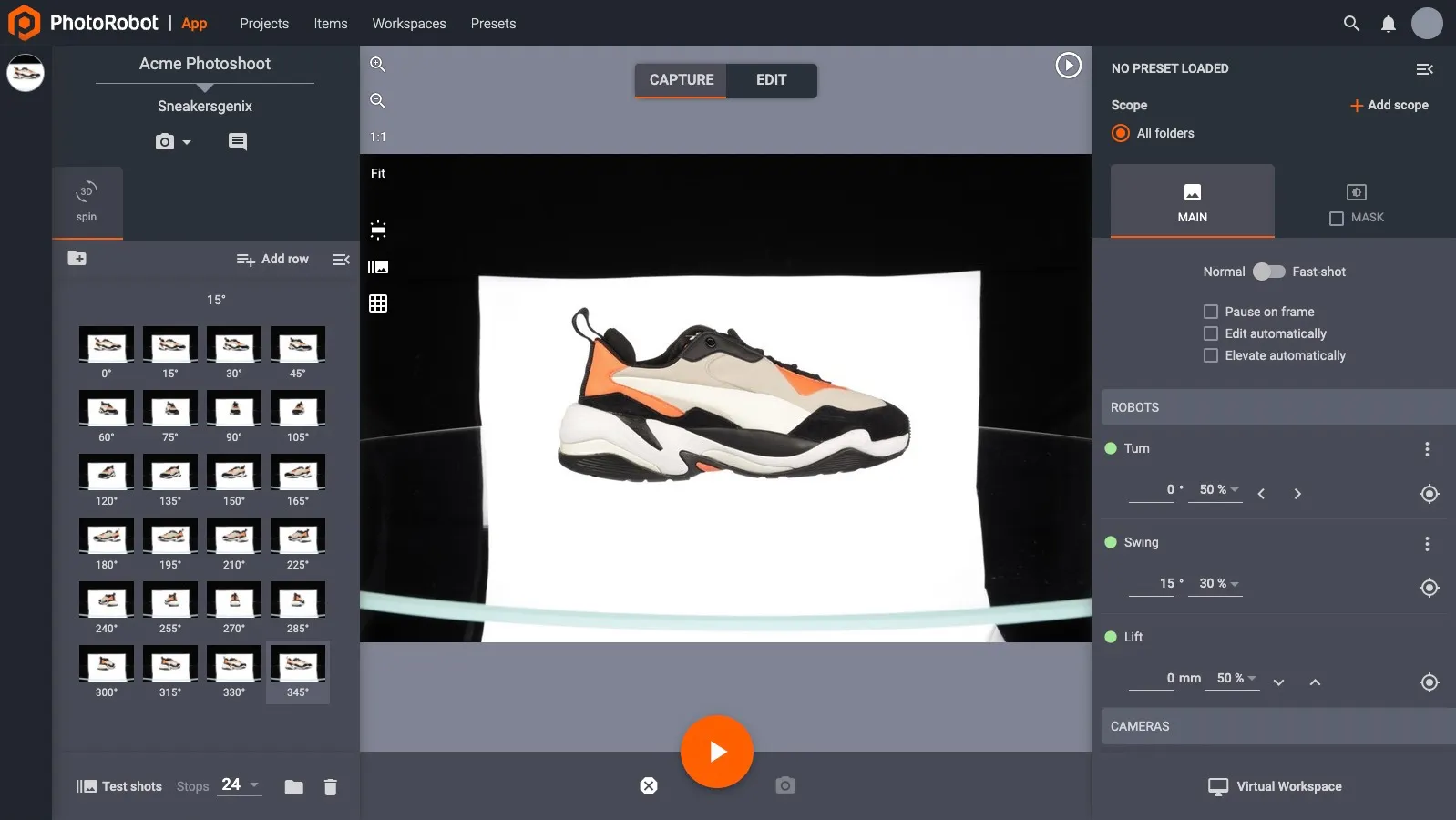
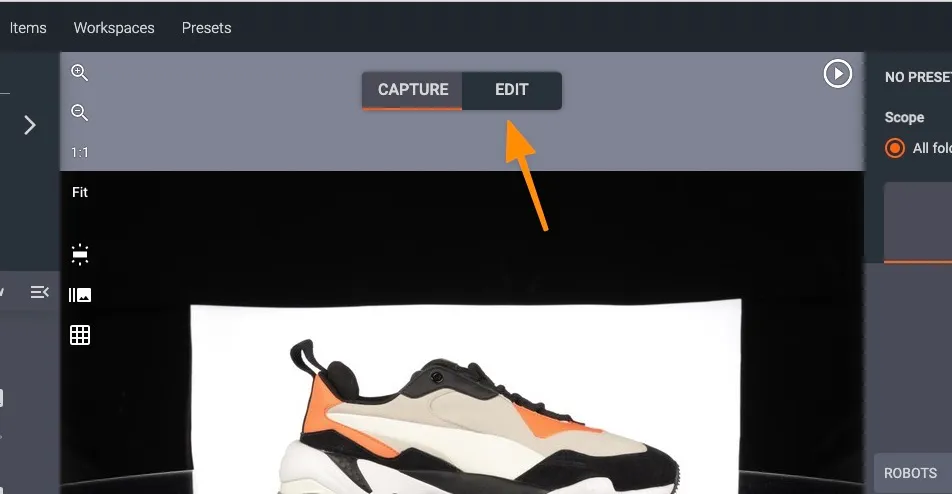
Fiksavimo režimo sąsaja
Spustelėję elementą, būsite nukreipti į fiksavimo / redagavimo sąsają. Jums prieinami valdikliai keičiami atsižvelgiant į tai, ar fiksavimo režimas yra aktyvus, ar į redagavimo režimą. Fiksavimo režimas naudojamas fotografavimo sekai valdyti, o redagavimo režimas valdo visus po apdorojimo, atliekamus CAPP. Aktyvusis režimas bus paryškintas ekrano viršuje:
Sukimų, kadrų arba vaizdo įrašų aplanko įtraukimas
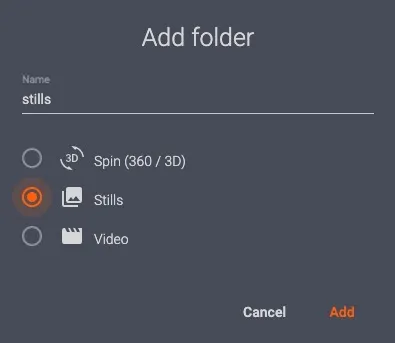
Prieš bet kokią fotosesiją turite sukurti bent vieną aplanką. Pagrindiniai aplankų tipai yra sukimasis (naudojamas 360° pristatymams), kadrai (nejudantiems vaizdams) ir vaizdo įrašai (vaizdo įrašams).
Sukimų aplanko kūrimas
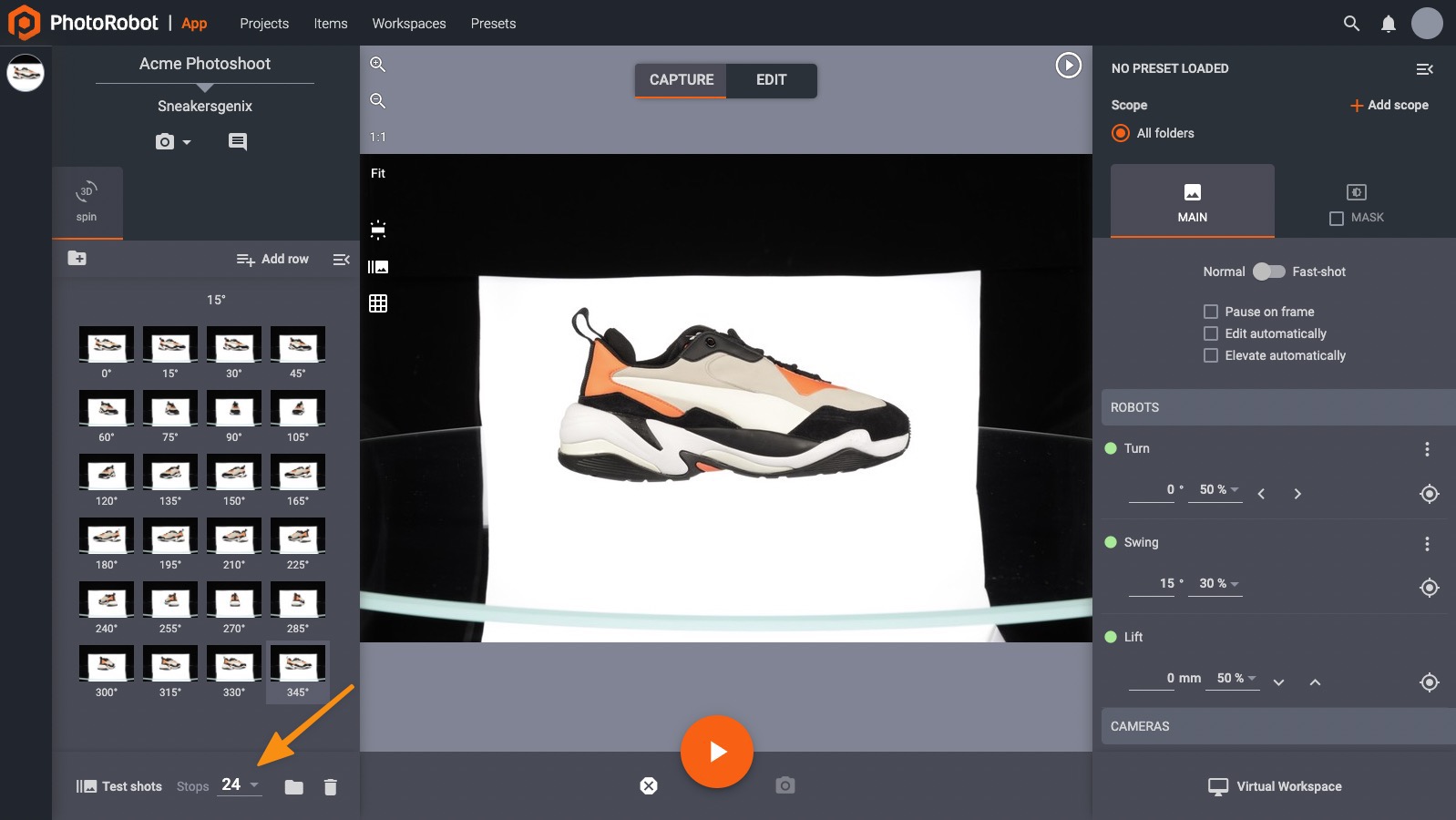
Pridėdamas sukimosi aplanką, CAPP automatiškai pridės stoteles (dar vadinamas "rėmeliais") pagal tai, kiek vaizdų per sukinį pasirinksite. Numatytasis skaičius yra 36, ir tai galima pakeisti apatiniame kairiajame kampe. Esant didesniam sustojimų skaičiui, sukimas bus sklandesnis, tačiau jis taip pat užims daugiau vietos saugykloje.
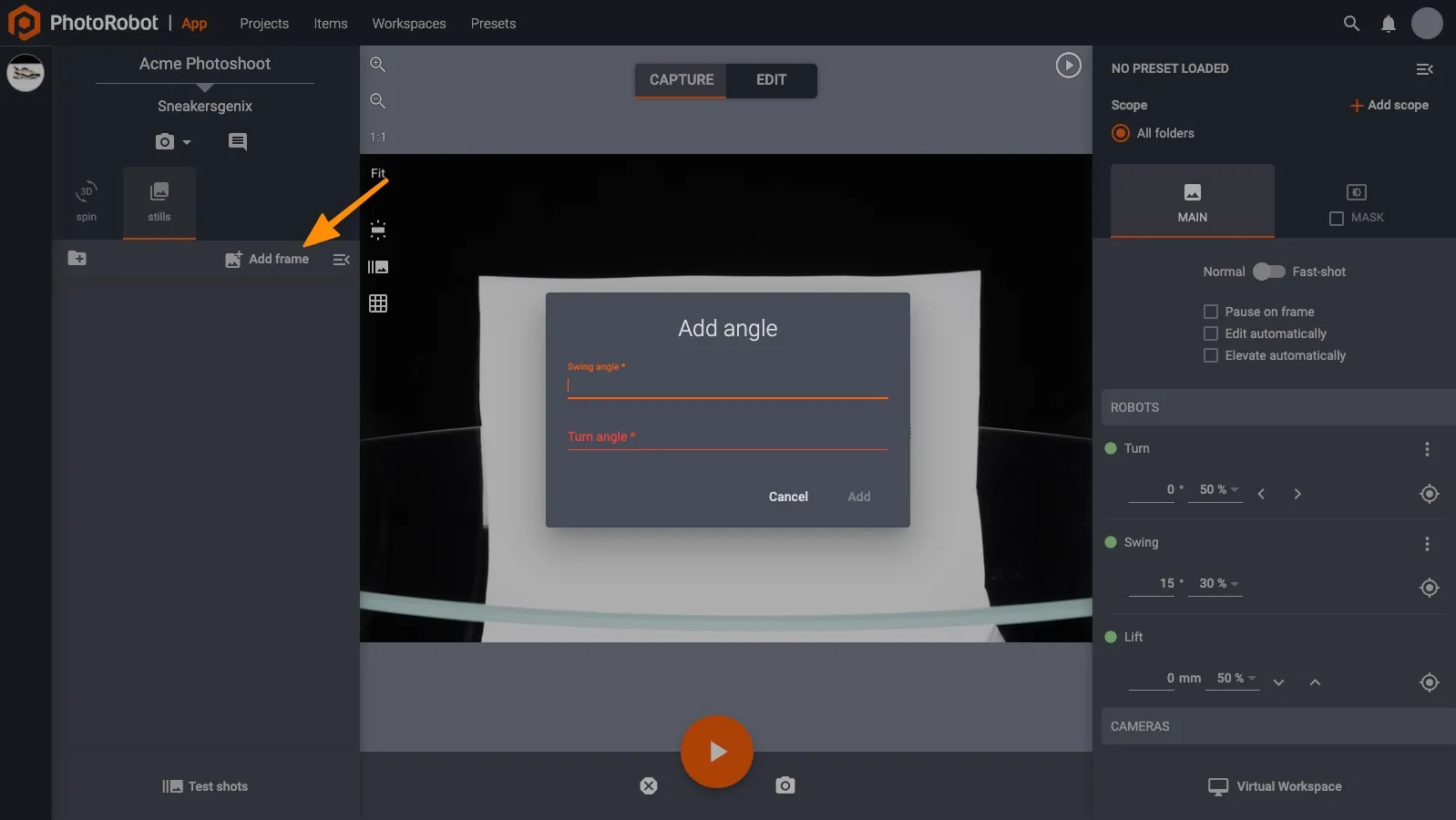
Kadrų aplanko kūrimas
Jei pasirenkate kadrų aplanką, galite pridėti sustojimus rankiniu būdu. Tai apims posūkio kampą (sukimosi kampą) ir sūpynės kampą (vertikali fotoaparato padėtį apvalia trajektorija). Sūpynės kampas yra svarbus, jei naudojate mūsų robotų ranką ar kitą modulį, kuris gali pakeisti horizontalią fotoaparato padėtį.
Importuoti vaizdus
Kai kuriais atvejais galbūt norėsite importuoti vaizdus į naują arba esamą aplanką CAPP. Paimkite, pavyzdžiui, kišeninių nuotraukų, išsamių kadrų ar kitų įvairių vaizdų importavimą.
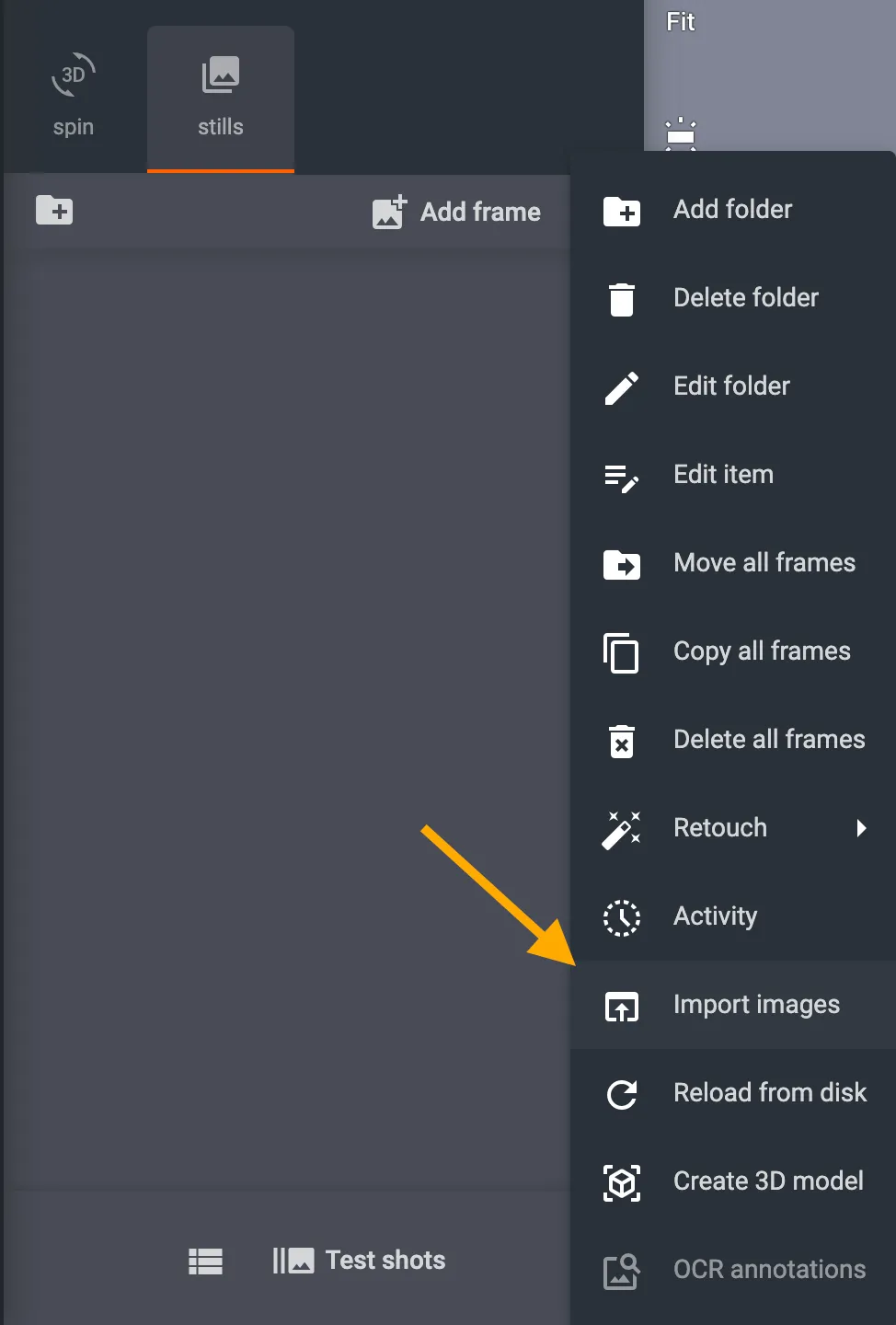
Norėdami importuoti vaizdus į CAPP, pirmiausia atidarykite naują arba esamą elementą CAPP fiksavimo režimo sąsajoje. Tada spustelėkite aplanko operacijų meniu piktogramą viršutiniame dešiniajame aplankų sąsajos kampe.
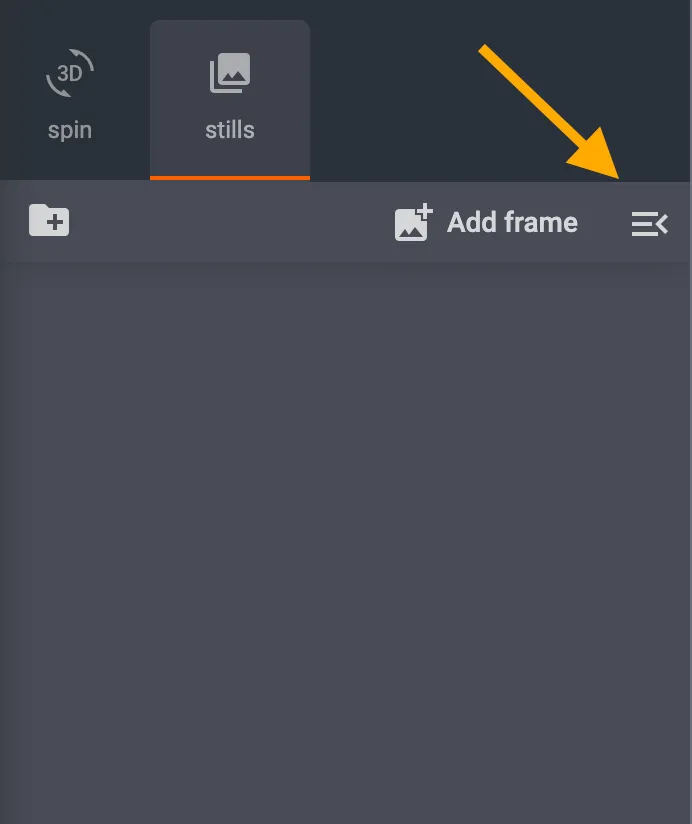
Tada aplanko operacijų meniu parinktyse raskite ir spustelėkite Importuoti vaizdus iš sąrašo.
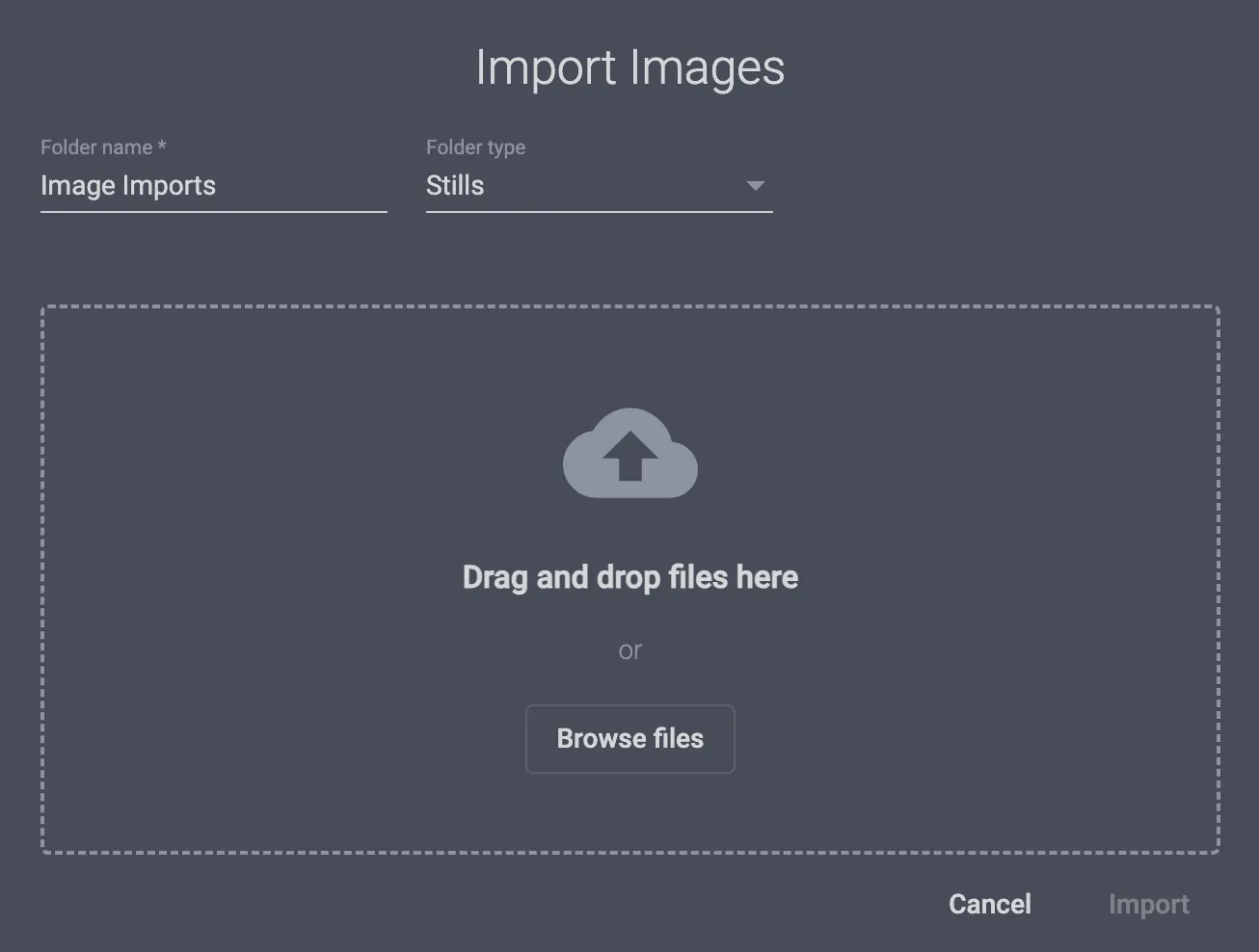
Spustelėjus Importuoti vaizdus bus atidarytas iššokantis langas, įgalinantis vaizdų importavimą nuvelkant arba naršant vietinius failus. Lango viršuje taip pat galima sukonfigūruoti importuotų vaizdų aplanko pavadinimą ir aplanko tipą.
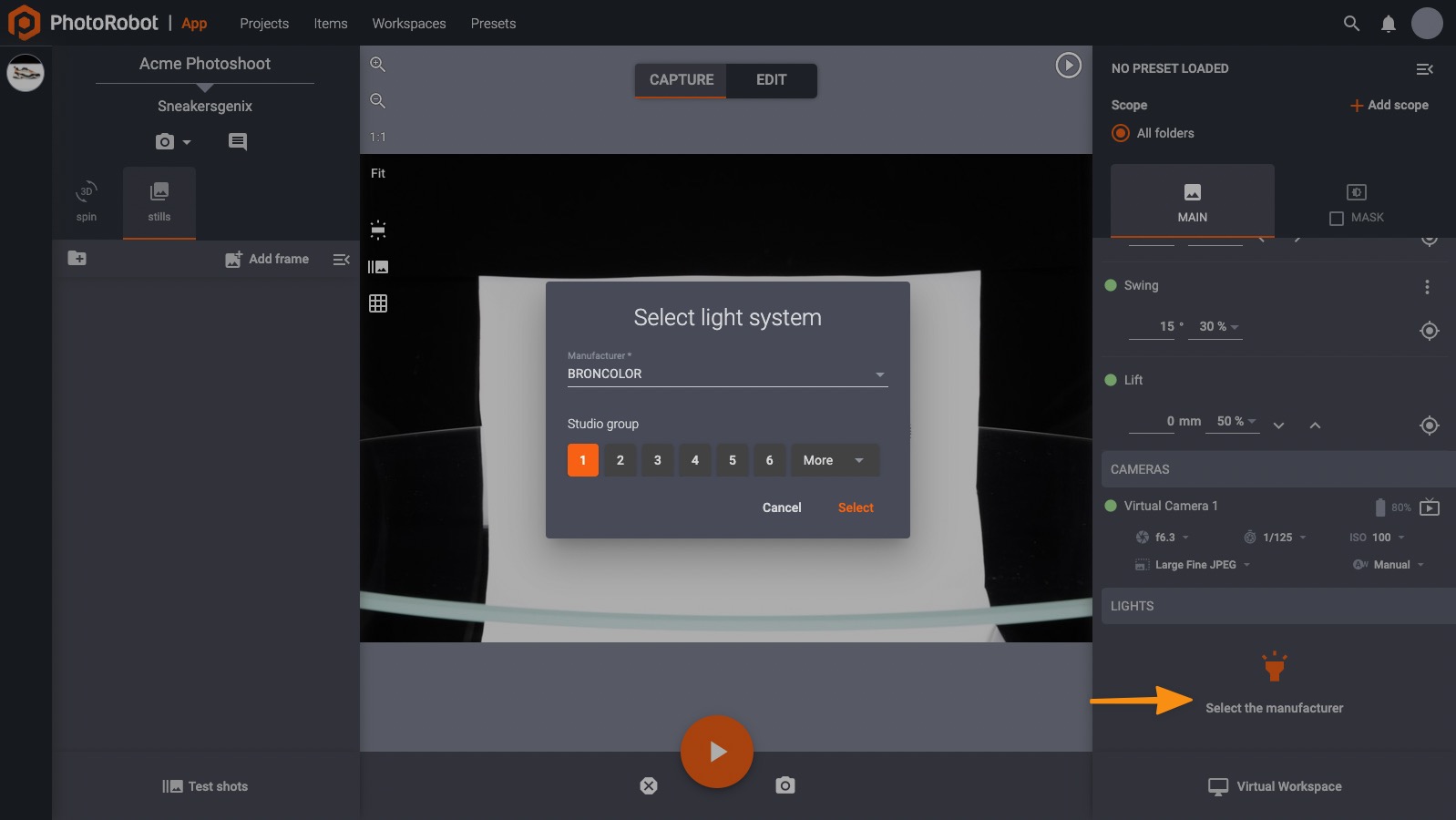
Valdyti suderinamus žibintus
Naudodami žibintus, suderinamus su CAPP, galite pasirinkti šviesas apatiniame dešiniajame redagavimo režimo lango kampe.
Fiksavimo režimo sąsajos apžvalga
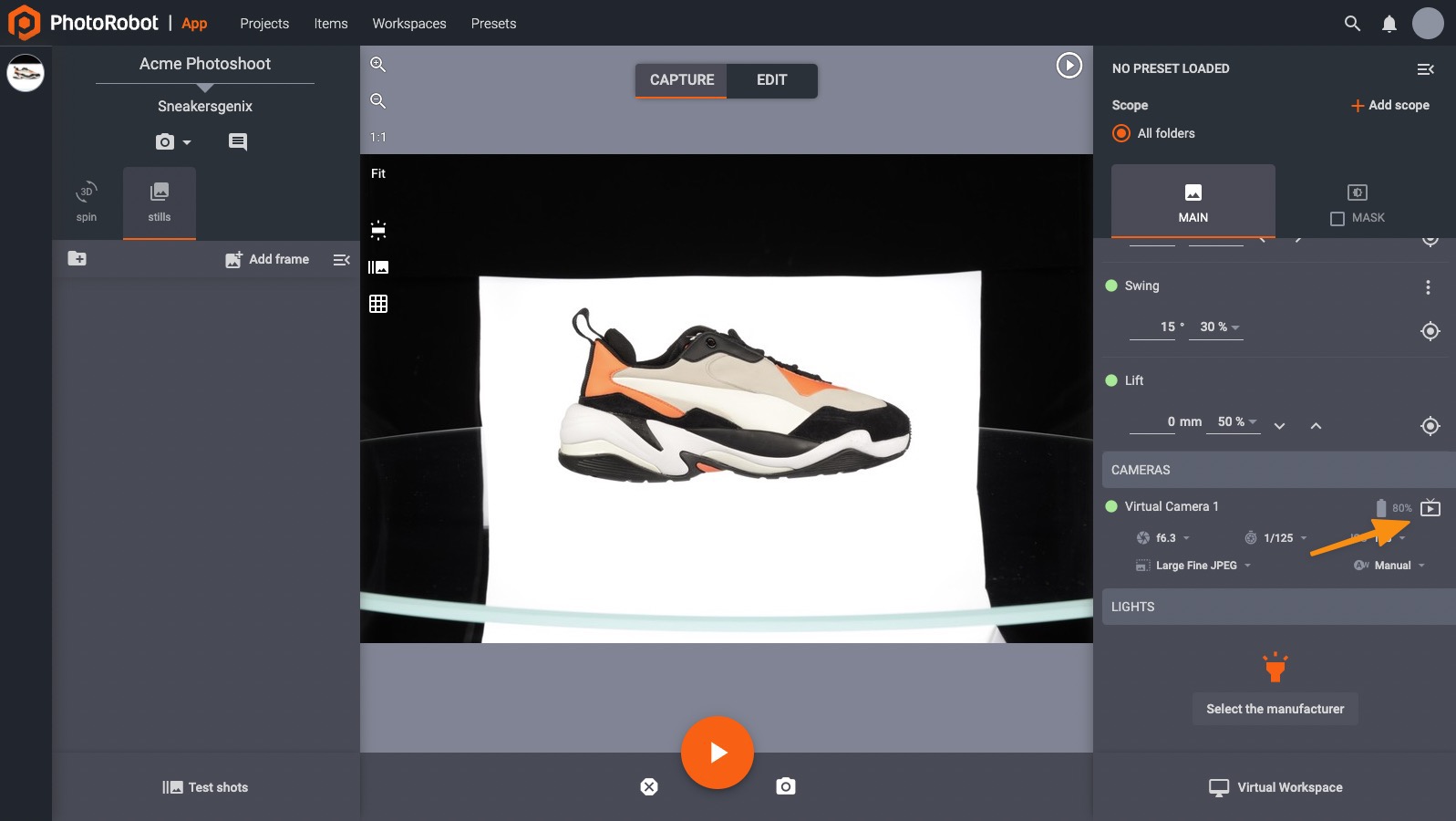
Centrinėje fiksavimo režimo sąsajos dalyje yra peržiūros langas, kuriame rodomas šiuo metu pasirinktas vaizdas (jei jau atlikote) arba tiesioginis vaizdas, transliuojamas iš fotoaparato.
"Live View", kuris yra naudingas, jei norite patikrinti ramybę ir fokusavimą, gali būti perjungtas fotoaparato valdymo srityje centrinėje valdymo juostos dalyje dešinėje ekrano pusėje.
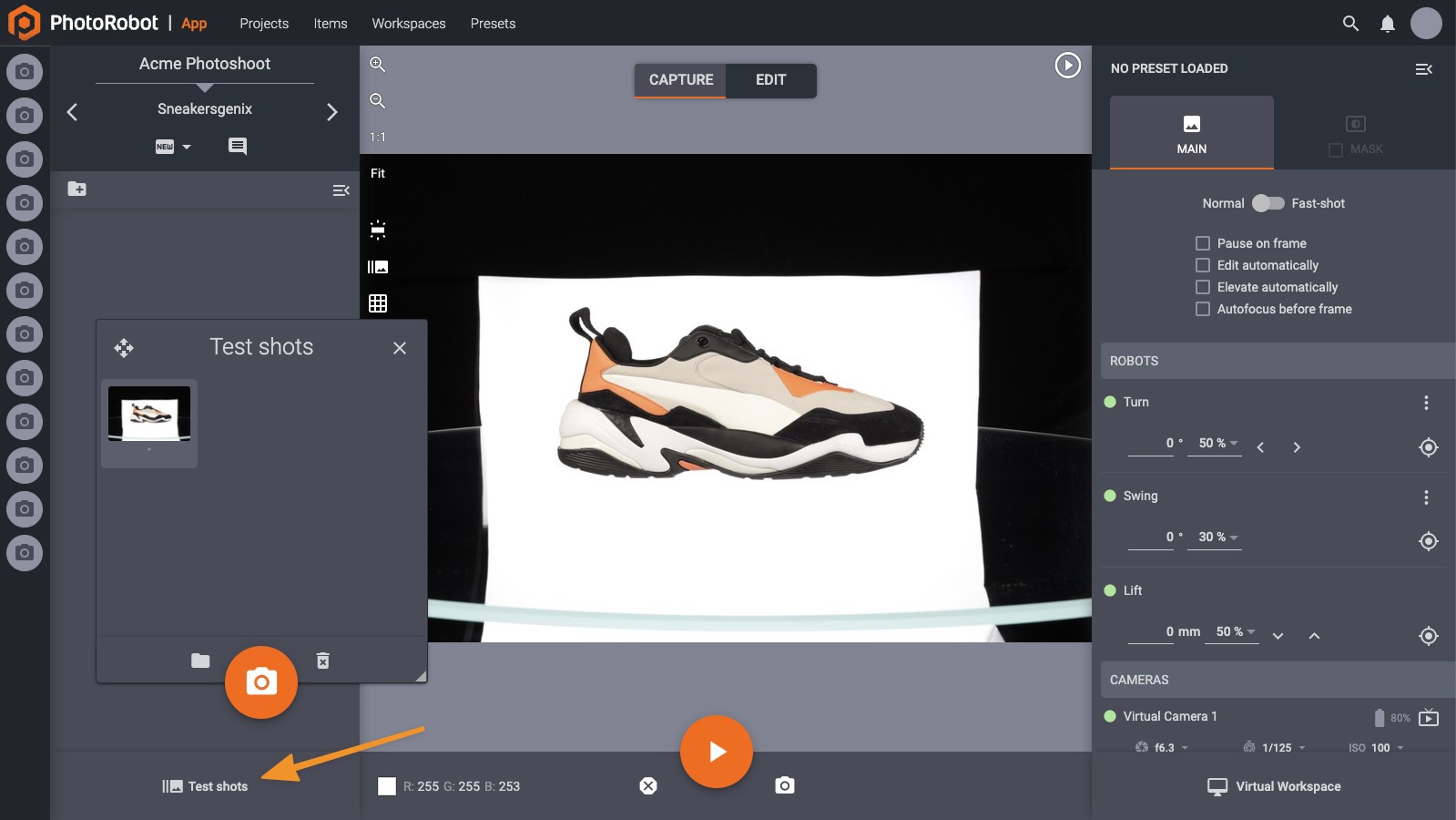
Bandomųjų kadrų ėmimas
Prieš darant galutinius vaizdus, tai yra gera idėja imtis vieną ar daugiau bandomųjų kadrų. Paprasčiausias būdas tai padaryti yra paspausti kompiuterio klaviatūros T klavišą. Tai padės jums patikrinti, ar turėtumėte pakeisti savo žibintų, fotoaparato ir kt. Nustatymus. Bandomieji vaizdai saugomi aplanke "Bandomoji kopija", kurį galite pasiekti apatinėje kairėje ekrano dalyje.
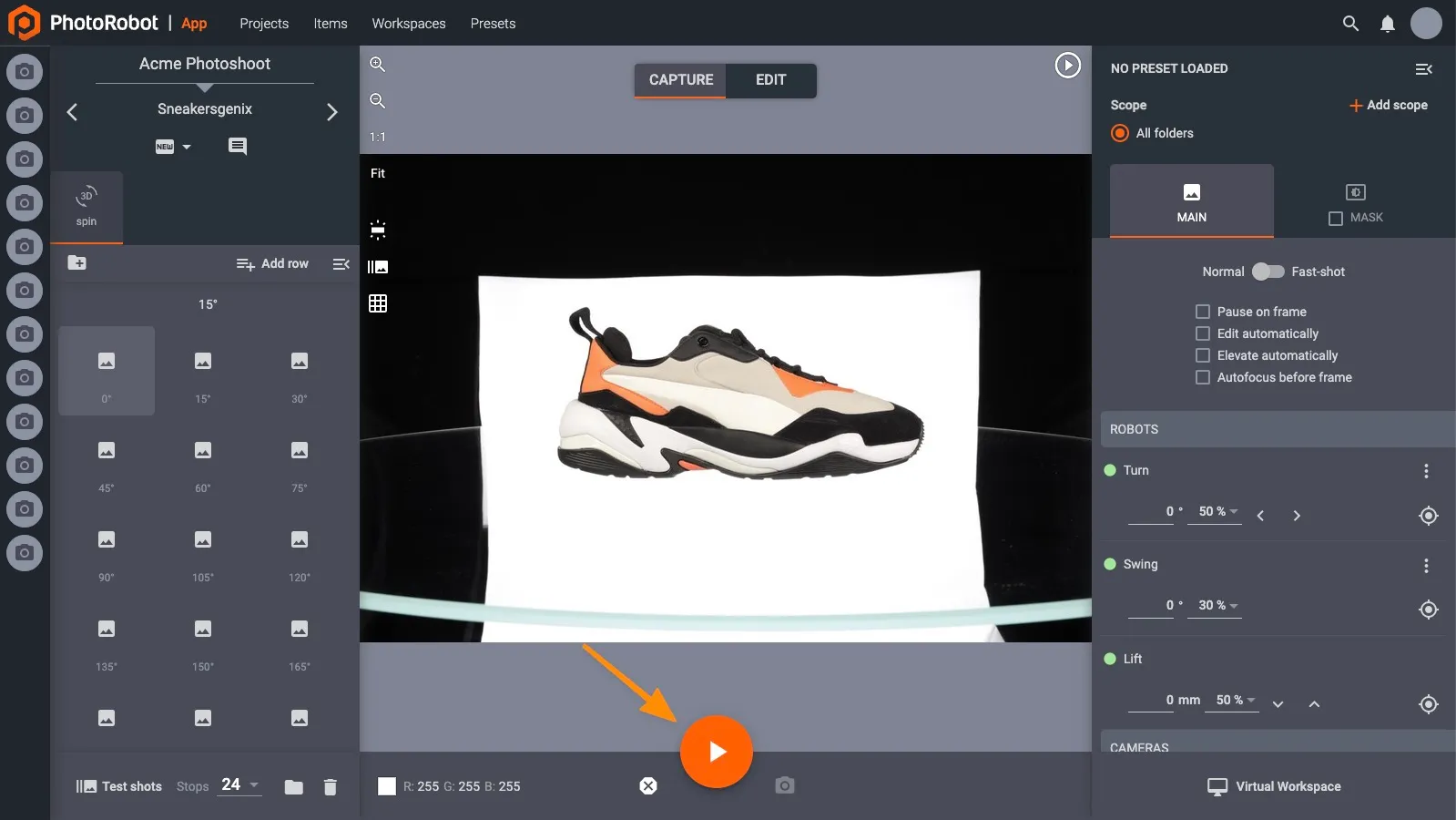
Fotografavimo sekos pradžia
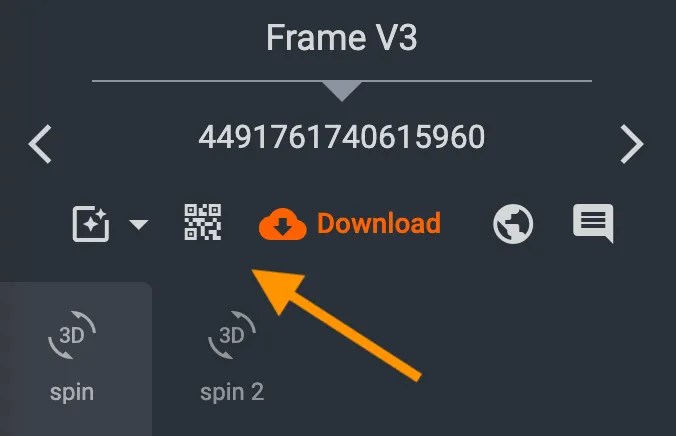
Kai būsite patenkinti nustatymais, kurie buvo patikrinti atliekant bandomąjį kadrą, atėjo laikas paleisti fotografavimo seką. Tai galima suaktyvinti paspaudus klaviatūros tarpo juostą arba spustelėjus mygtuką "pradėti", rodomą žemiau esančiame paveikslėlyje.
Jei turite brūkšninių kodų skaitytuvą, seką taip pat galite suaktyvinti nuskaitydami specialų "pradžios" brūkšninį kodą. Atsisiųskite "PhotoRobot" brūkšninį kodą internetu ir atsispausdinkite, kad galėtumėte naudoti šią funkciją.

Žinosite, kad seka sėkmingai baigta, jei visos miniatiūros kairėje pusėje buvo užpildytos vaizdais. Gera praktika atkreipti dėmesį į bet kokius galimus strobų žiburių gedimus.
Jei kuri nors miniatiūra yra tamsesnė, palyginti su kitomis, sumažinkite sukimosi greitį arba, jei reikia, patikrinkite savo žibintų būklę. Tada galite pažymėti šiuos vaizdus ir perdaryti juos be būtinybės paleisti visą seką dar kartą.
Kai fiksavimo seka bus baigta, galite perjungti į redagavimo režimą, kuriame atliksite apdorojimą po apdorojimo.
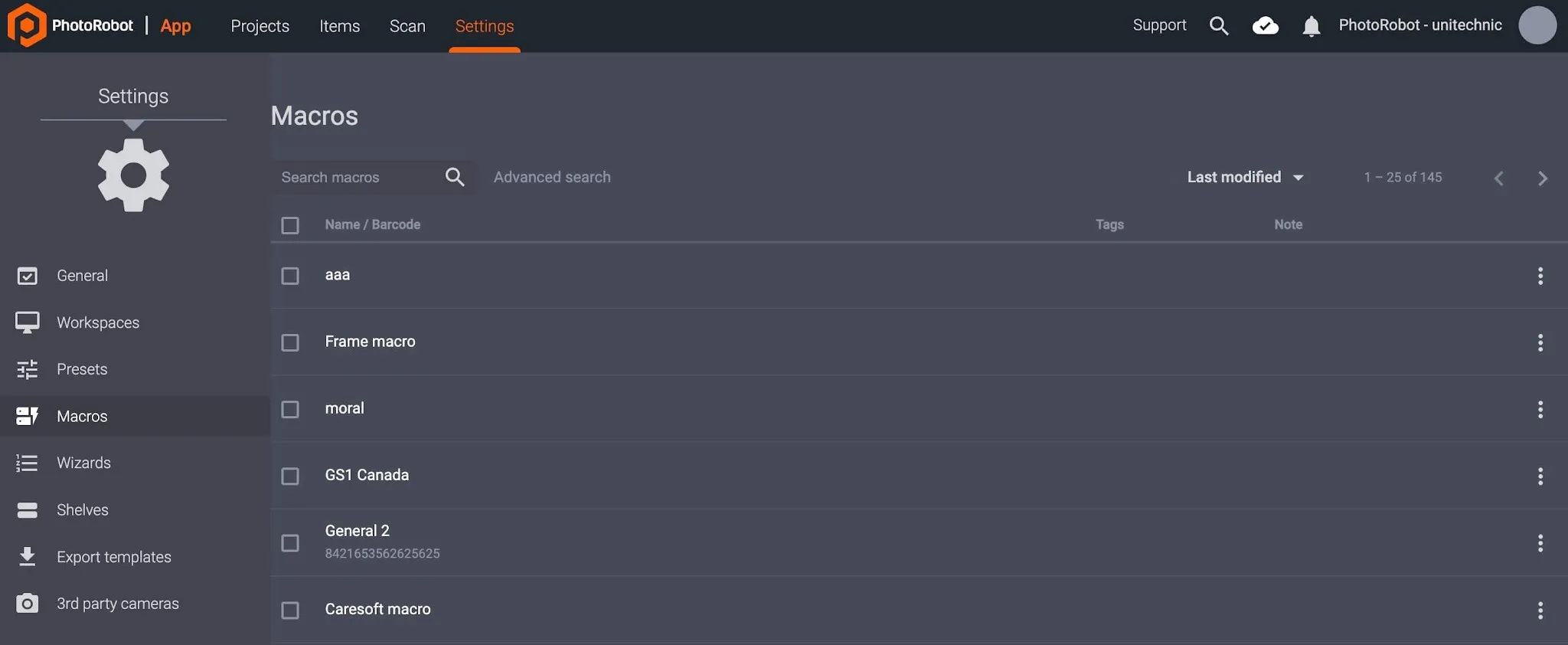
PhotoRobot makrokomandos
CAPP makrokomandos leidžia vartotojams apibrėžti elemento ir jo aplankų fiksavimo proceso komandas (sukimąsi, kadrus ir kt.). Komandos gali būti taikomos atskiriems arba keliems aplankams, vykdyti sekas, redaguoti vaizdus, darbo sritis, parengtinius nustatymus, kopijuoti vaizdo parametrus ir perkelti vaizdo parametrus. Vartotojai taip pat gali toliau tinkinti makrokomandas pagal pavadinimą, brūkšninį kodą, žymę arba pastabas.
Pastaba: Išsamias instrukcijas apie PhotoRobot makrokomandų konfigūravimą ir naudojimą rasite PhotoRobot makrokomandų vartotojo vadove. Sužinokite, kaip makrokomandos įgalina fotografijos automatizavimo magiją keliuose aplankuose ir komponentuose, automatiškai apdorojant sudėtingas užduotis.
PhotoRobot Vedlių režimas
Vedlių režimas CAPP veikia kaip alternatyva rankinei aparatinės įrangos, kameros ir sekos konfigūracijai. Naudojant, Vedlių režimas leidžia administratoriui arba fotografui kurti skirtingus Vedlius, kad supaprastintų fiksavimo režimą gamybos linijos operatoriams. Operatorius tada gali paleisti CAPP Vedlių režimu, kuris veikia kaip itin paprasta sąsaja su vedlio vadovaujamais žingsniais. Taip pat yra riboti valdikliai, skirti palengvinti naudojimą ir įdiegimą.
Sukūrus vedlį, jame saugomi išankstiniai nustatymai ir darbo srities konfigūracijos, taip pat iš anksto nustatyti veiksmai, kuriuos operatoriai turi atlikti. Operatoriai negali koreguoti jokių nustatymų ir turi atlikti kiekvieno žingsnio instrukcijas, prieš pereidami prie kito proceso.
Pastaba: Vedlio žingsniai apibrėžiami į JavaScript panašiu kalbos formatu ir juos kuria PhotoRobot konsultantai, siekiant individualizuoto funkcionalumo. Vartotojai taip pat gali kurti pagrindines funkcijas pradiniams eksperimentams ar paprastoms sąrankoms. Dokumentaciją apie techninę konfigūraciją ir vedlių naudojimą rasite PhotoRobot Vedlio režimo vartotojo vadove.
Redaguoti režimo sąsają
Dešinėje ekrano pusėje galite pridėti bet kokį redagavimo operacijų skaičių:
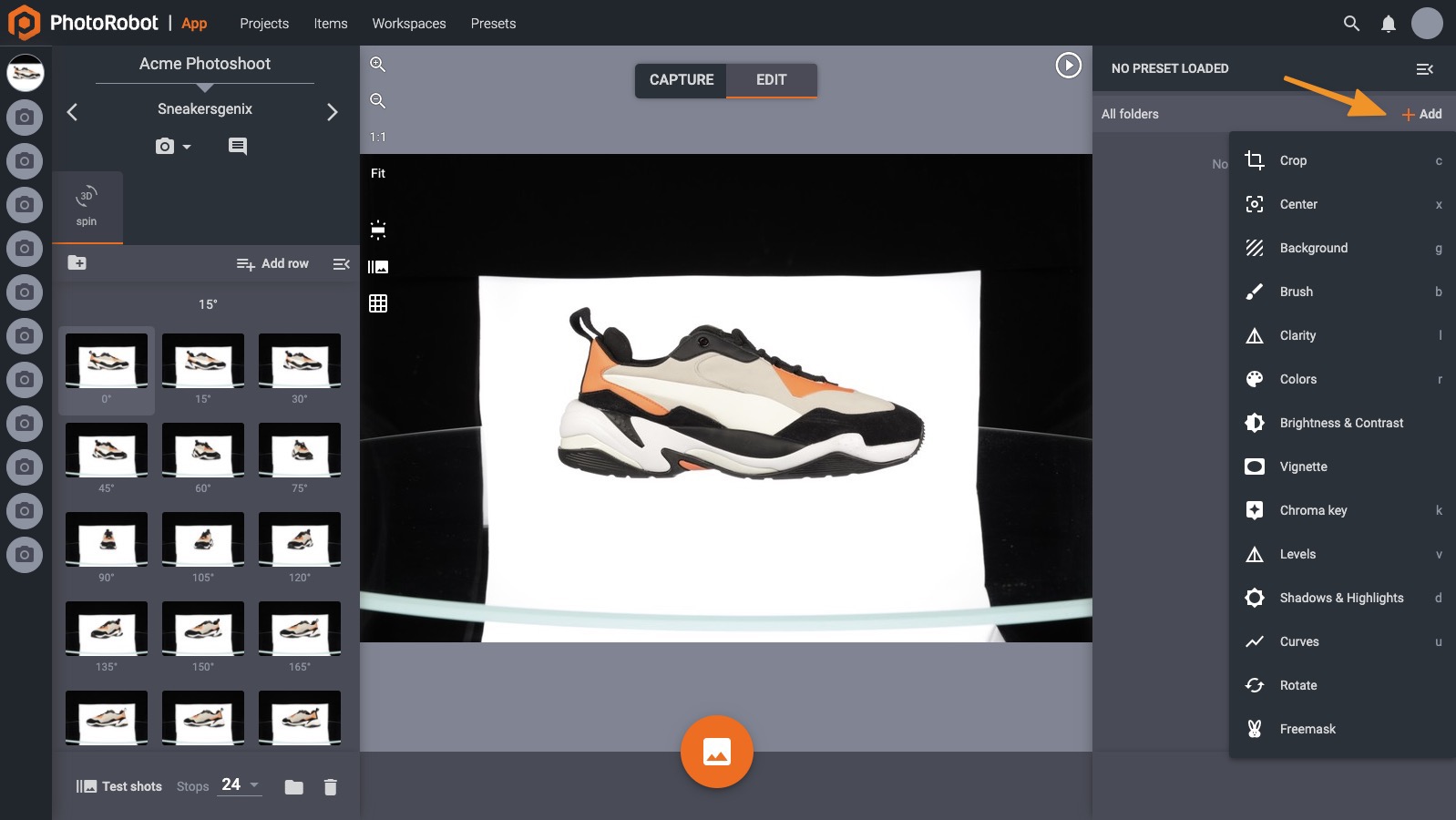
Kai kurios dažniausiai pasitaikančios redagavimo operacijos išvardytos viršuje: apkarpymas, centras ir fonas.
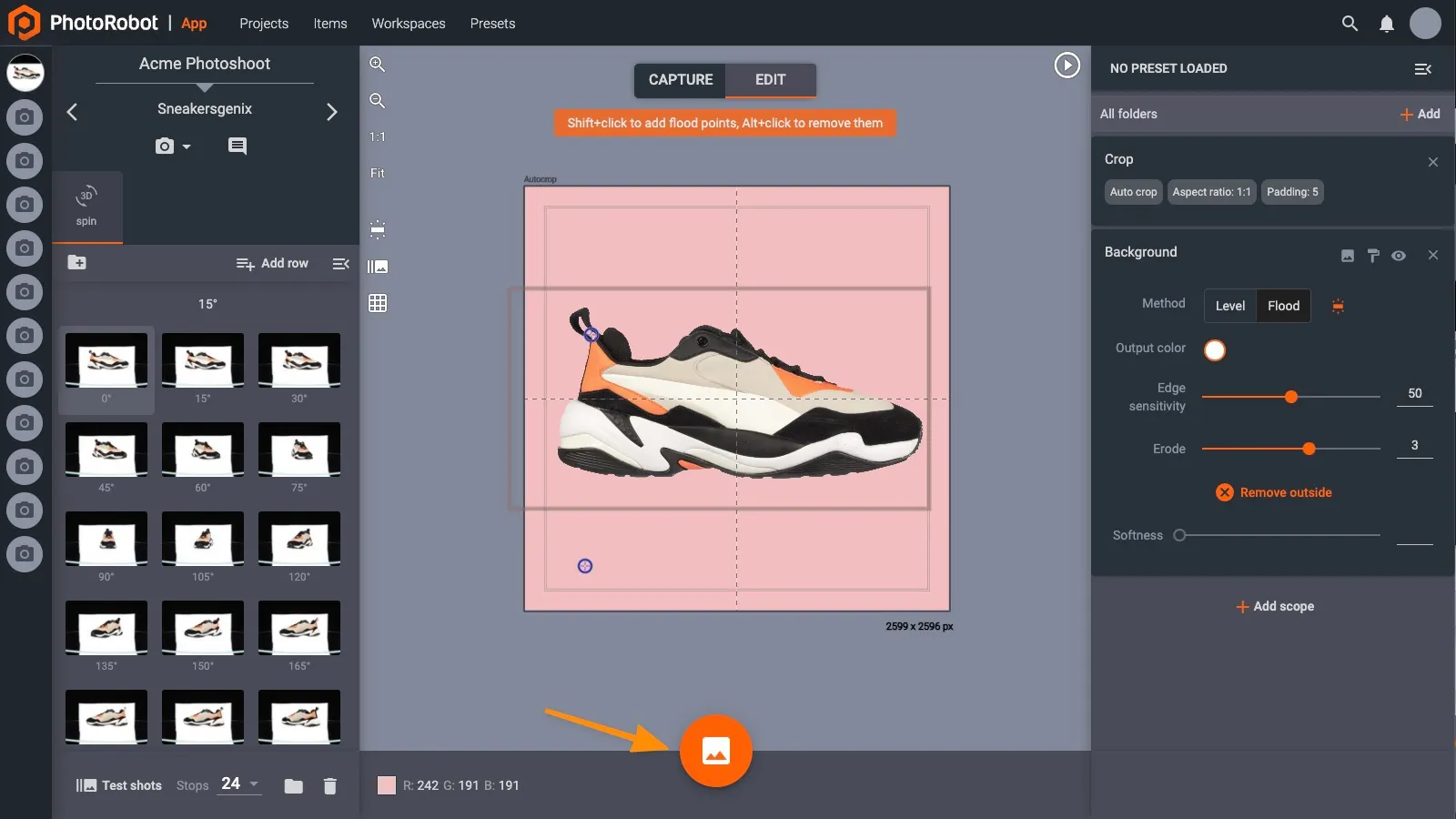
Automatinis apkarpymas
Apkarpant vaizdus, yra trys pagrindiniai valdikliai: automatinio apkarpymo perjungimai, kraštinių santykis ir paminkštinimas (kuris kontroliuoja, kiek vietos yra aplink fotografuojamą objektą).

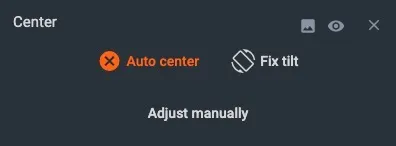
Autocentras
Centras - nors dauguma PhotoRobot mašinų yra aprūpintos lazeriais, kurie padeda išdėstyti objektus ant paviršiaus, daugumai vaizdų reikės papildomos programinės įrangos. Tai ypač svarbu 360° sukimui. Pradedant rekomenduojama išlaikyti "automatinio centro" funkciją, kaip parodyta toliau esančiame paveikslėlyje:
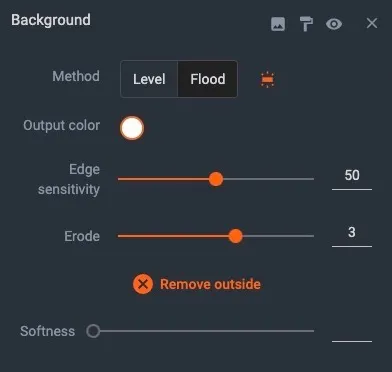
Fono šalinimas
Operacija Fonas sureguliuos vaizdo ar vaizdo rinkinio foną, jei norite, visiškai pašalindama foną. Skirtingus rezultatus galima pasiekti naudojant tris skirtingus CAPP fono pašalinimo metodus. Yra fono pašalinimas pagal lygį, fono pašalinimas potvyniu ir laisvu maskavimu.
- Fono pašalinimas pagal lygį naudoja programinės įrangos RGB spalvų lygių ir ryškumo verčių analizę, kad nustatytų foną ir priekinį planą. Tai naudinga fotografuojant ryškius ar baltus daiktus ir naudojant baltą foną. Sureguliuokite programinės įrangos lygius, kad fono ryškumas būtų intensyvesnis, kol jis taps grynai baltas. Tada galima padaryti foną skaidrų arba sukeisti skirtingų spalvų fonus.
- Fono pašalinimas potvynio būdu veikia panašiais principais kaip ir fono pašalinimas pagal lygį ir dažniausiai yra naudingas fotografuojant tamsesnius daiktus. Pašalinus foną potvynio operacija, fono ryškumas tampa intensyvesnis, kol aplink elementą jis tampa grynai baltas. Tačiau, užuot reguliavęs lygius, įrankis naudoja pasirinktą tašką fonui identifikuoti ir tada "užtvindo" tą sritį. Vartotojai tiesiog spusteli tašką už fotografuojamo objekto ribų. Tada programinė įranga aptinka objekto kraštus ir taiko potvynį, kad užpildytų aplink jį esančią erdvę.
- Norint užmaskuoti foną , reikia daugiau konfigūracijos nei naudojant lygius ar potvynį, tačiau tai gali būti vienas tiksliausių ir greičiausių būdų. Šis metodas naudoja iškirptą kaukės vaizdą ir pagrindinį produkto vaizdą, sudarydamas du vaizdus, kad pašalintų foną. Kartais tai yra vienintelis efektyvus būdas pašalinti foną aplink "sudėtingesnius" objektus. Paimkite, pavyzdžiui, atspindinčius daiktus arba objektus, kuriuose yra tuščios vietos. Laisvas maskavimas identifikuoja objektą, palyginti su visa tuščia vieta, tuo pačiu pašalindamas foną aplink elementą ir, jei reikia, jo viduje. Tačiau metodas reikalauja papildomos studijos šviesų konfigūracijos, kad būtų galima sukurti pagrindinius ir užmaskuotus vaizdus fonui pašalinti.
Nata: Atminkite, kad tai, ar CAPP galės pašalinti foną, daugiausia priklauso nuo to, kaip apšviesta scena. Jei negalite rasti nustatymų, kurie tenkina, iš naujo užfiksuokite vaizdus naudodami skirtingus apšvietimo nustatymus.
Kai būsite patenkinti savo redagavimo nustatymais, pritaikykite parametrus spustelėdami mygtuką "taikyti", esantį ten, kur anksčiau pasirodė mygtukas "pradėti".
Vaizdų publikavimas
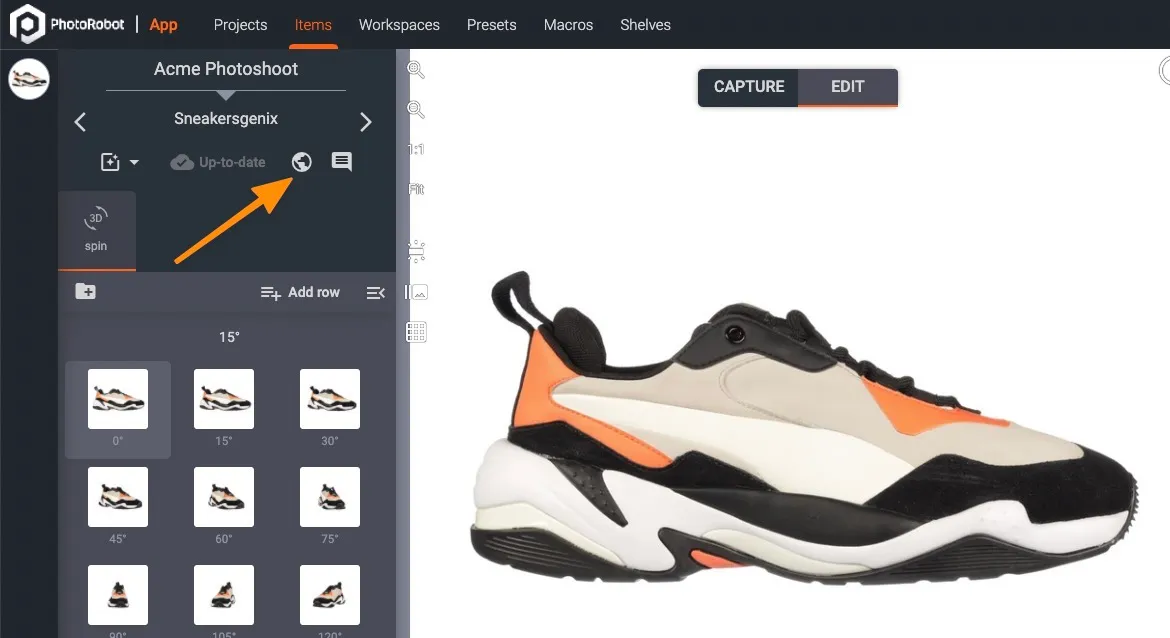
Kai eigos juosta pasiekia savo pabaigą, jūsų redagavimai buvo sėkmingai pritaikyti jūsų vaizdams. Jei naudojate CAPP be PhotoRobot Debesies tarnybų, gauti vaizdai saugomi vietinio disko aplankų struktūroje.
Jei naudojate PhotoRobot debesies prieglobą, failus taip pat galima rasti PhotoRobot debesies saugykloje. Norėdami juos pasiekti, spustelėkite Atidaryti debesyje, esančiame viršutinėje kairėje ekrano dalyje esančiame skyriuje Nuotraukos.
Vaizdų eksportavimas
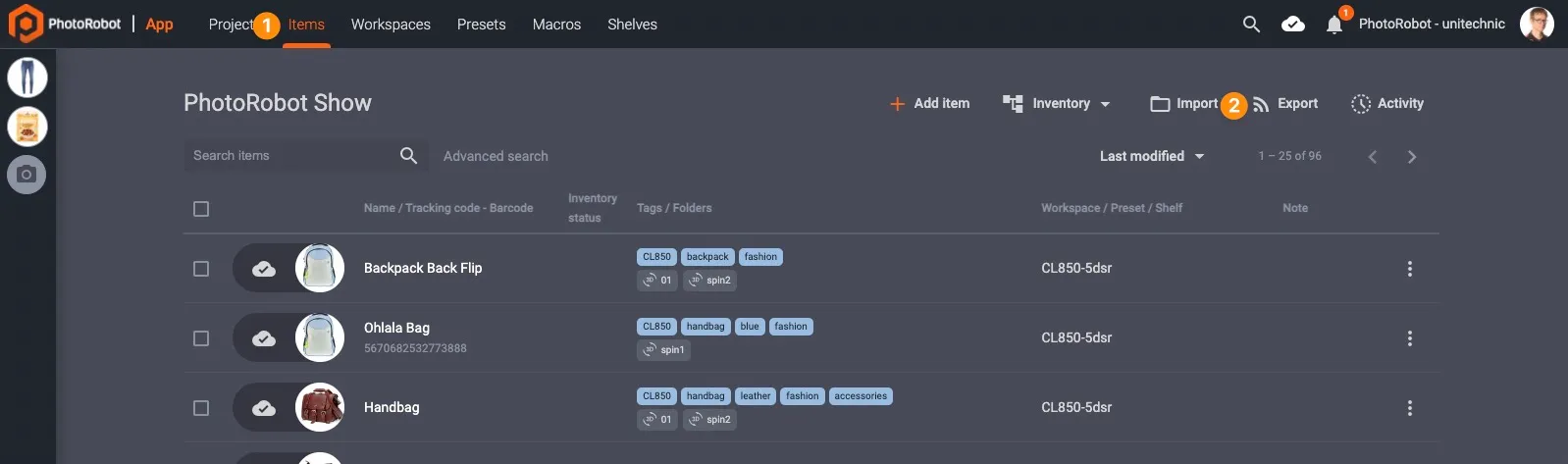
Norėdami eksportuoti elementą iš CAPP, vartotojai gali eksportuoti į vietinį diską arba eksportuoti į PhotoRobot Cloud". Elementų eksportas leidžia apibrėžti elementus naudojant pasirinktines pavadinimų suteikimo konvencijas, nurodyti vaizdo formatą, skiriamąją gebą ir įvairius rinkmenos pavadinimo šablono kintamuosius.
Norėdami pasiekti elementų eksportavimo parametrus, eikite į skyrių Elementai ir spustelėkite Eksportuoti meniu virš elementų sąrašo:
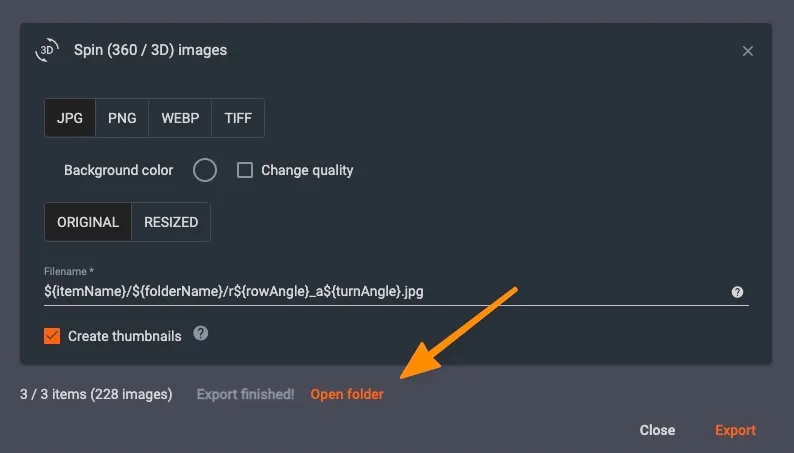
Atsidarys šis langas, leidžiantis keisti eksportavimo parametrus:
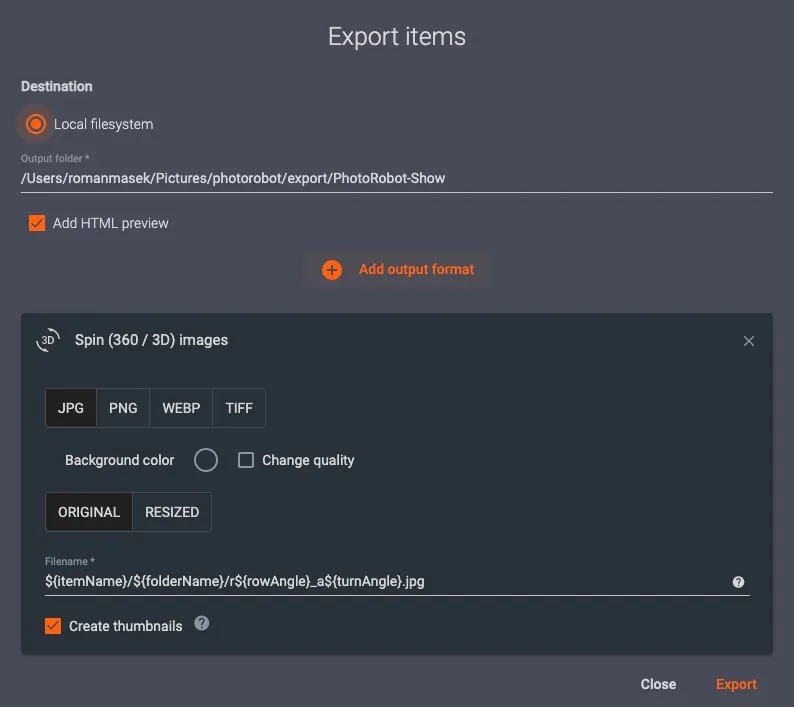
Paleiskite eksportavimo procesą spustelėdami mygtuką Eksportuoti apatiniame dešiniajame šio lango kampe.
Kai eksportavimo eigos juosta pasieks pabaigą, galite spustelėti Atidaryti aplanką , kad pasiektumėte eksportuotus vaizdus.
Publikuoti debesyje
Jei publikavimas naudojant PhotoRobot Debesies tarnybas, pirmiausia atidarykite elementą debesyje. Sąsajoje rodomas užfiksuotas vaizdas. Mygtukas Kodai ir saitai:
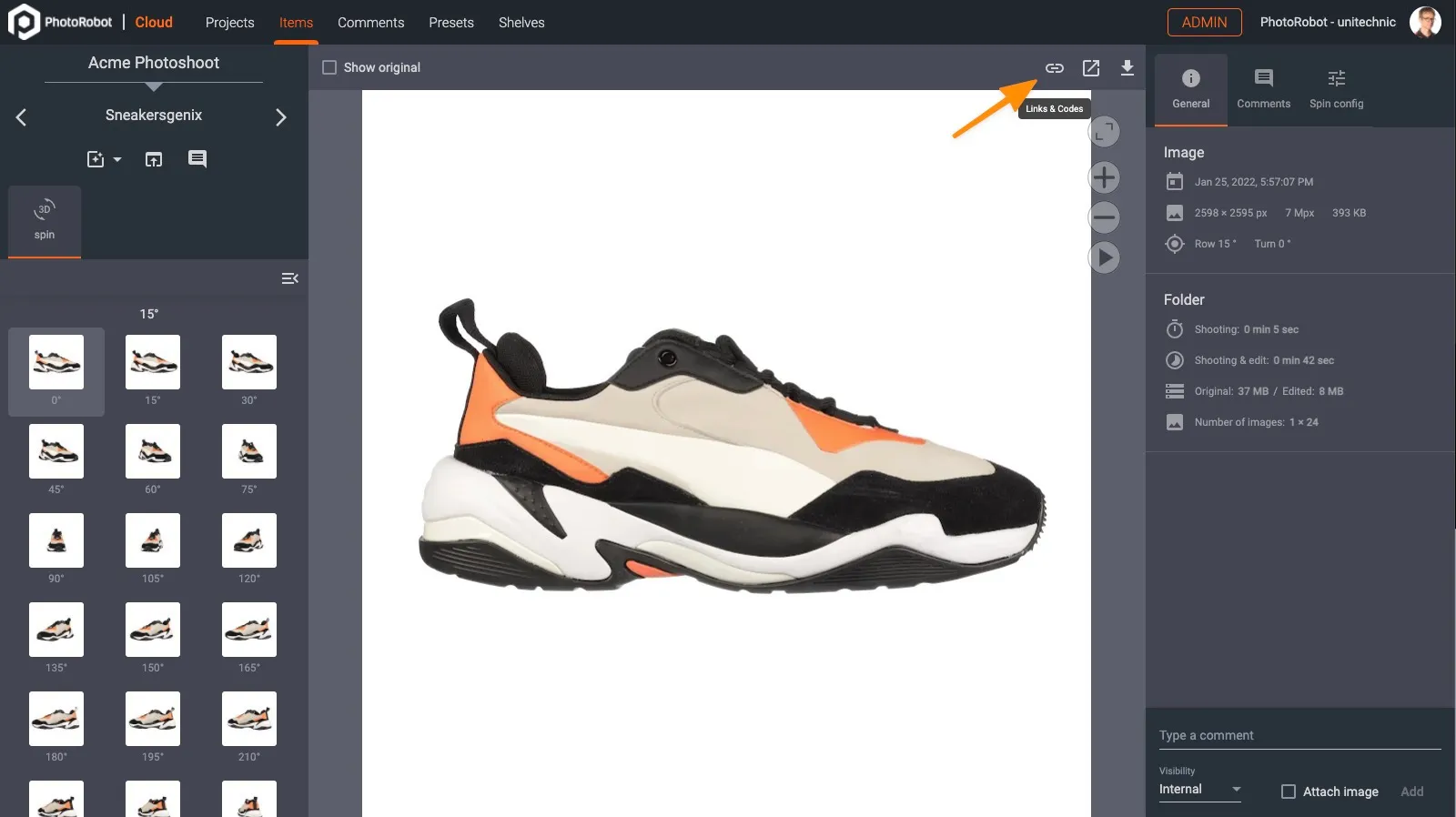
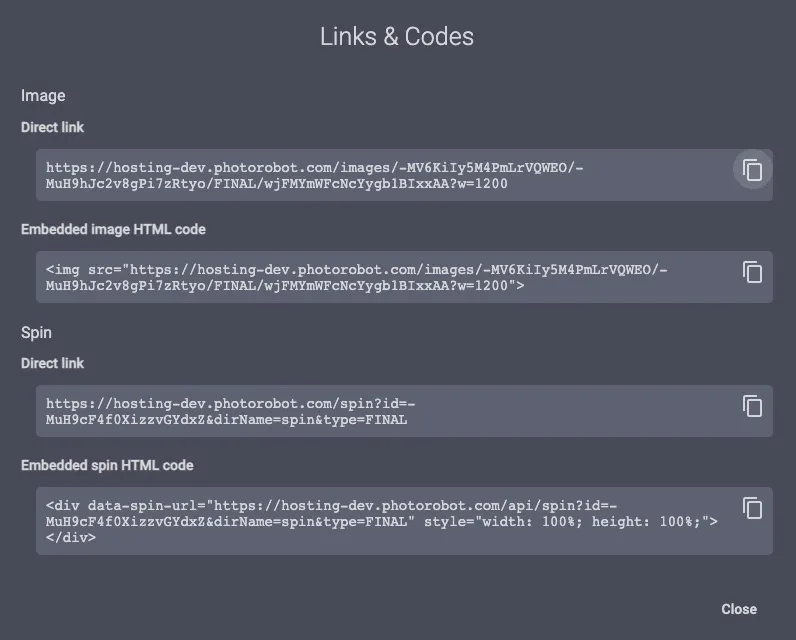
Nukopijuokite tiesioginį saitą ir įklijuokite jį į naršyklę, kad peržiūrėtumėte vaizdą arba sukimą. Įklijuokite šį kodą į puslapį, kad įdėtumėte rodymo sukimą.


EOS sukilėlių serija


EOS DSLR serija


EOS M serija be veidrodžių


"PowerShot" serija


Iš arti / delninis

"Canon EOS Rebel" serija siūlo pradedantiesiems pritaikytus DSLR fotoaparatus su tvirta vaizdo kokybe, intuityviu valdymu ir universaliomis funkcijomis. Šie fotoaparatai, idealiai tinkantys fotografijos entuziastams, užtikrina patikimą automatinį fokusavimą, įvairaus kampo jutiklinius ekranus ir "Full HD" arba 4K vaizdo įrašymą.
Ryšys
Skiriamoji geba (MP)
Rezoliucija
"Canon EOS DSLR" serija užtikrina aukštos kokybės vaizdus, greitą automatinį fokusavimą ir universalumą, todėl idealiai tinka tiek fotografijai, tiek vaizdo įrašų gamybai.
Ryšys
Skiriamoji geba (MP)
Rezoliucija
"Canon EOS M Mirrorless" serija sujungia kompaktišką dizainą su DSLR panašiu našumu. Šios kameros su keičiamais objektyvais, greitu automatiniu fokusavimu ir aukštos kokybės vaizdo jutikliais puikiai tinka keliautojams ir turinio kūrėjams, ieškantiems perkeliamumo neprarandant vaizdo kokybės.
Ryšys
Skiriamoji geba (MP)
Rezoliucija
"Canon PowerShot" serija siūlo kompaktiškas, patogias kameras atsitiktiniams šauliams ir entuziastams. Su modeliais nuo paprastų taškų ir fotografavimo iki pažangių priartinimo kamerų, jie užtikrina patogumą, tvirtą vaizdo kokybę ir tokias funkcijas kaip vaizdo stabilizavimas ir 4K vaizdo įrašas.
Ryšys
Skiriamoji geba (MP)
Rezoliucija
"Canon" stambiu planu ir rankiniai fotoaparatai yra skirti detaliam, artimam fotografavimui ir vaizdo įrašams. Kompaktiški ir paprasti naudoti, jie siūlo tikslų fokusavimą, didelės skiriamosios gebos vaizdą ir universalias makrokomandų galimybes – puikiai tinka vaizdams rašyti tinklaraščius, fotografuoti produktus ir kurti stambiu planu.


